
PCL 点云采样
创始人
2024-03-18 12:06:22
一、简介
点云采样一般有三种方式,上采样,下采样,平均采样
原理介绍
下采样:
一般是采样是通过构建一个三维体素的格栅,然后在每个体素内用体素的重心近似的作为这个体素的整体特征,也就是说用这一个体素的重心来表示这个体素内的所有点。这样我们正在处理点云的过程中就会起到滤波的作用,同时也减少了很多数据在点云配准的过程当中大大加快了速度。
上采样:
类似于二维图像中的线性插值等,上采样是在增加点的个数,我们可以细想一下,一个点云中当点间距足够小的时候,点会连接起来这样的话就形参了一个曲面,因此上采样从另外一种程度上来说也可以说的是曲面重建的一种方式
有步骤如下
1、创建一个采样的对象
2、创建kdtree
3、设置 kdtree 的搜索范围
4、设置采样对象的方法
5、设置采样对象的半径和步长
6、开始上采样
二、降(下)采样

核心代码:
pcl::PointCloud::Ptr newcloud(new pcl::PointCloud);// 对这个点云进行下采样pcl::VoxelGrid sor;sor.setInputCloud(m_current_cloud);sor.setLeafSize(0.1f,0.1f,0.1f); // 采样间隔sor.filter(*newcloud); // 采样 并输出到新的点云里面
整体代码:
#if 1 // 点云下采样
int main()
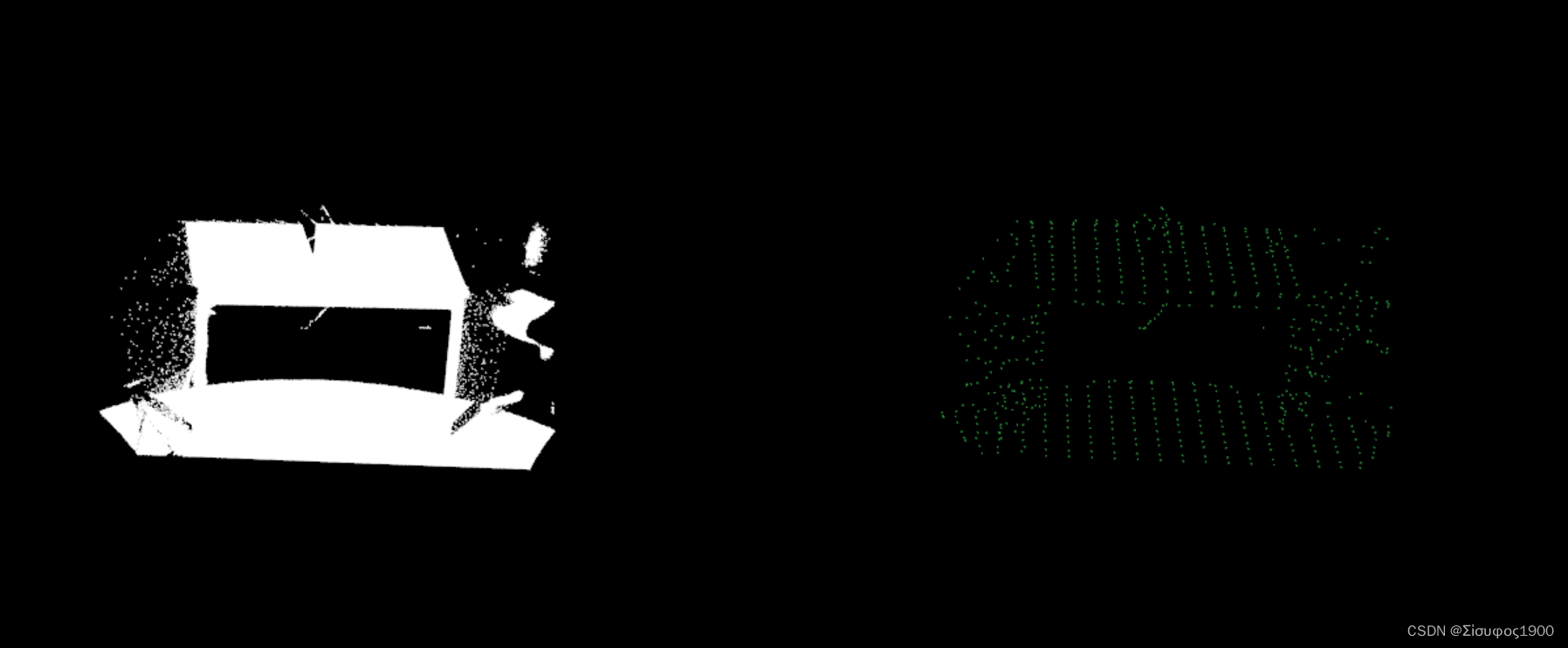
{pcl::PointCloud::Ptr m_current_cloud(new pcl::PointCloud);if (-1 == pcl::io::loadPCDFile("empty desktop.pcd", *m_current_cloud))//放到与工程中的主.cpp同一位置的文件夹下{cout << "加载文件失败!" << endl;return -1;}cout << "原始点云的点数: " << m_current_cloud->points.size() << endl;pcl::PointCloud::Ptr newcloud(new pcl::PointCloud);// 对这个点云进行下采样pcl::VoxelGrid sor;sor.setInputCloud(m_current_cloud);sor.setLeafSize(0.1f,0.1f,0.1f); // 采样间隔sor.filter(*newcloud); // 采样 并输出到新的点云里面cout <<"降采样之后的点云的点数: " << newcloud->points.size() << endl;// 可视化// boost::shared_ptrviewer(new pcl::visualization::PCLVisualizer("Normal viewer"));pcl::visualization::PCLVisualizer viewer("demo");// 设置点云的显示两个点云到同一个viewer 中int v1(0);int v2(1);viewer.createViewPort(0.0, 0.0, 0.5, 1.0, v1);viewer.createViewPort(0.5, 0.0, 1.0, 1.0, v2);// 设置点云颜色float bckgr_gray_level = 0.0; float txt_gray_lvl = 1.0 - bckgr_gray_level;// 显示原始点云pcl::visualization::PointCloudColorHandlerCustom cloud_in_color_h(m_current_cloud, (int)255 * txt_gray_lvl, (int)255 * txt_gray_lvl, (int)255 * txt_gray_lvl);viewer.addPointCloud(m_current_cloud, cloud_in_color_h, "cloud_in_v1", v1); // 显示降采样之后的滤波pcl::visualization::PointCloudColorHandlerCustom cloud_out_green(newcloud, 50, 180, 70);viewer.addPointCloud(newcloud, cloud_out_green, "cloud_out", v2);// 这种背景 只设置viewer.setBackgroundColor(bckgr_gray_level, bckgr_gray_level, bckgr_gray_level, v2);// 这种vtk窗口的大小viewer.setSize(1280, 1024); // 点云显示while (!viewer.wasStopped()){viewer.spinOnce();}return 0;}
#endif
三、上采样
上一篇:通关算法题之 ⌈二叉树⌋ 下
下一篇:MySQL主从同步
相关内容
热门资讯
埃菲尔铁塔在哪 中国仿建埃菲尔...
2019年4月26日,广西南宁市,街头惊现一座巨型山寨版埃菲尔铁塔,高约20米,白色塔身,造型逼真,...
北京的名胜古迹 北京最著名的景...
北京从元代开始,逐渐走上帝国首都的道路,先是成为大辽朝五大首都之一的南京城,随着金灭辽,金代从海陵王...
苗族的传统节日 贵州苗族节日有...
【岜沙苗族芦笙节】岜沙,苗语叫“分送”,距从江县城7.5公里,是世界上最崇拜树木并以树为神的枪手部落...
长白山自助游攻略 吉林长白山游...
昨天介绍了西坡的景点详细请看链接:一个人的旅行,据说能看到长白山天池全凭运气,您的运气如何?今日介绍...
世界上最漂亮的人 世界上最漂亮...
此前在某网上,选出了全球265万颜值姣好的女性。从这些数量庞大的女性群体中,人们投票选出了心目中最美...
应用未安装解决办法 平板应用未...
---IT小技术,每天Get一个小技能!一、前言描述苹果IPad2居然不能安装怎么办?与此IPad不...
脚上的穴位图 脚面经络图对应的...
人体穴位作用图解大全更清晰直观的标注了各个人体穴位的作用,包括头部穴位图、胸部穴位图、背部穴位图、胳...
demo什么意思 demo版本...
618快到了,各位的小金库大概也在准备开闸放水了吧。没有小金库的,也该向老婆撒娇卖萌服个软了,一切只...
猫咪吃了塑料袋怎么办 猫咪误食...
你知道吗?塑料袋放久了会长猫哦!要说猫咪对塑料袋的喜爱程度完完全全可以媲美纸箱家里只要一有塑料袋的响...
埃菲尔铁塔在哪 中国仿建埃菲尔...
2019年4月26日,广西南宁市,街头惊现一座巨型山寨版埃菲尔铁塔,高约20米,白色塔身,造型逼真,...
北京的名胜古迹 北京最著名的景...
北京从元代开始,逐渐走上帝国首都的道路,先是成为大辽朝五大首都之一的南京城,随着金灭辽,金代从海陵王...
苗族的传统节日 贵州苗族节日有...
【岜沙苗族芦笙节】岜沙,苗语叫“分送”,距从江县城7.5公里,是世界上最崇拜树木并以树为神的枪手部落...
世界上最漂亮的人 世界上最漂亮...
此前在某网上,选出了全球265万颜值姣好的女性。从这些数量庞大的女性群体中,人们投票选出了心目中最美...
长白山自助游攻略 吉林长白山游...
昨天介绍了西坡的景点详细请看链接:一个人的旅行,据说能看到长白山天池全凭运气,您的运气如何?今日介绍...