
【GD32F427开发板试用】+rtt-thread nano+finsh极简开发
创始人
2024-03-19 20:36:08
本篇文章来自极术社区与兆易创新组织的GD32F427开发板评测活动,更多开发板试用活动请关注极术社区网站。作者:理想三旬
引言
在工作闲暇之际,逛逛论坛,无意间看到GD的试用活动,一如既往的积极,在官方还没发布时就申请了,也如愿的收到了板子,感谢官方和社区给了探索这块板子的机会。
Why rtt
RT-Thread Nano 是一个极简版的硬实时内核,它是由 C 语言开发,采用面向对象的编程思维,具有良好的代码风格,是一款可裁剪的、抢占式实时多任务的 RTOS。其内存资源占用极小,功能包括任务处理、软件定时器、信号量、邮箱和实时调度等相对完整的实时操作系统特性。只需内核与Finsh就足够使用,简单方便,个人不喜欢太复杂。
资源
- GD32F427VKT6
- 32位Arm®Cortex®-M4处理器内核
- 高达200 MHz的工作频率
- 3072K Flash
- 256k SRAM
- 4个USART和4个UART,3个I2C,6个SPI,2个I2S,2个CAN2.0B
- 1个SDIO接口、1个10/100M以太网控制器
- 3个采样率高达2.6M SPS的12位高速ADC和2个12位DAC,
- 单循环乘法和硬件除法器
- 浮点单元(FPU)
- 集成DSP指令
- 集成嵌套矢量中断控制器(NVIC)
- 24位SysTick定时器
板载: - GDlink(可惜只能作为下载,没有串口)
- 复位按键和用户按键
- 一个用户LED
- USB_HS、USB_FS等
开发前准备 - 资料下载地址:
https://aijishu.com/a/1060000…
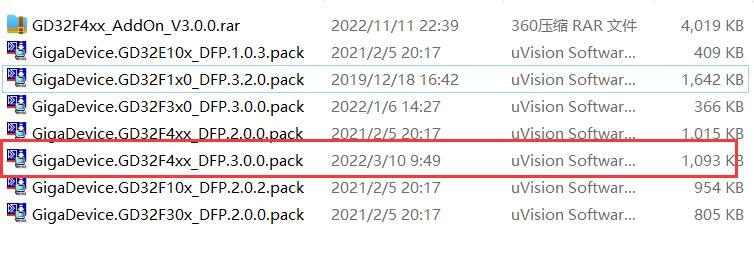
- 安装芯片包
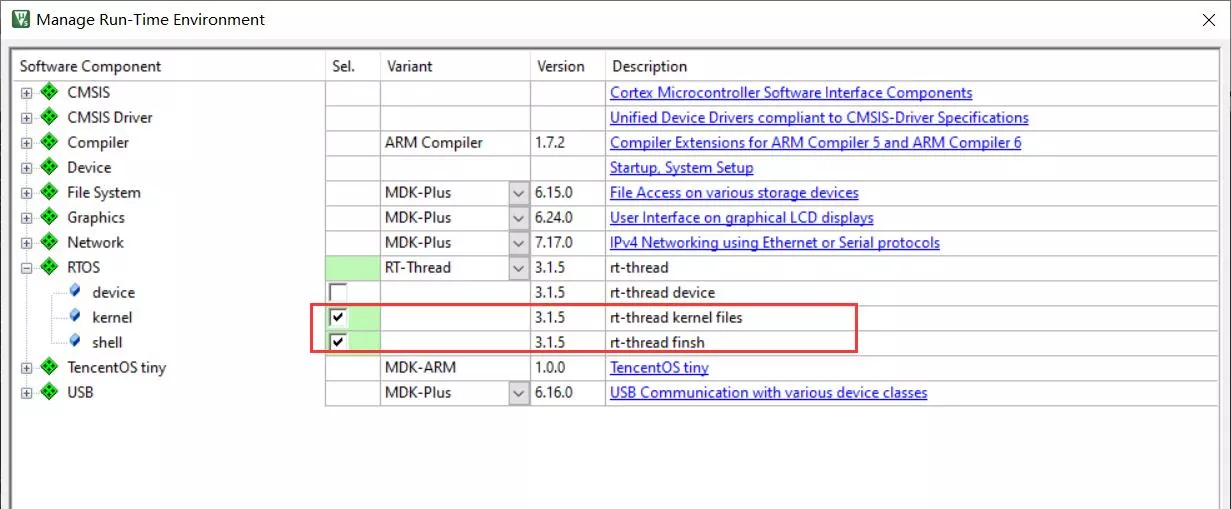
- keil安装rtt包
rtt移植
- 打开LED工程

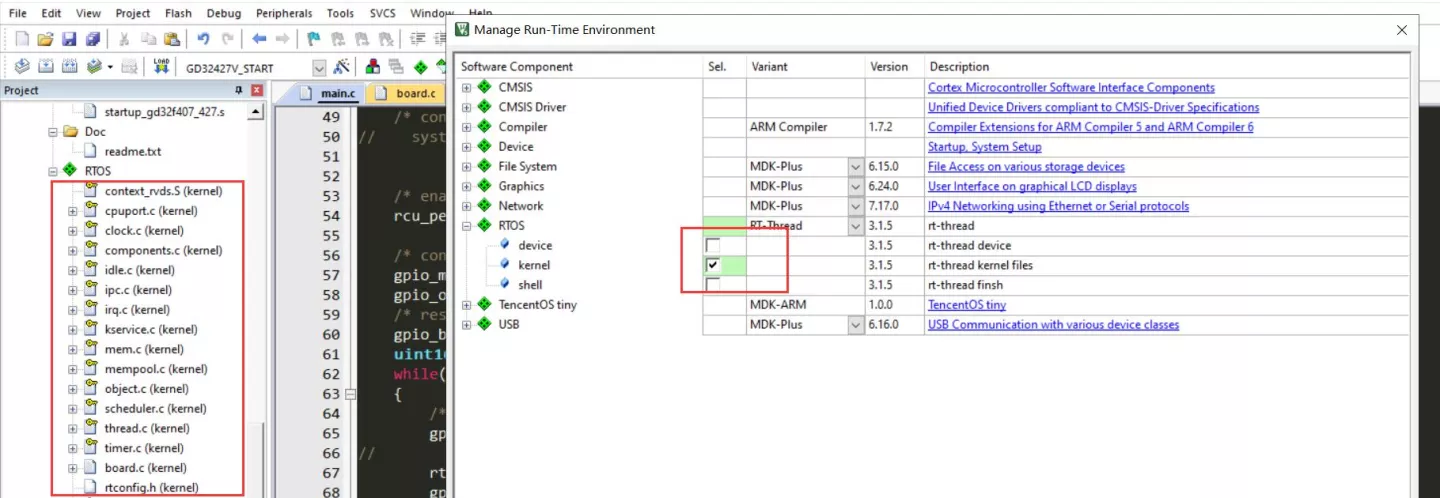
- 添加rtt源码
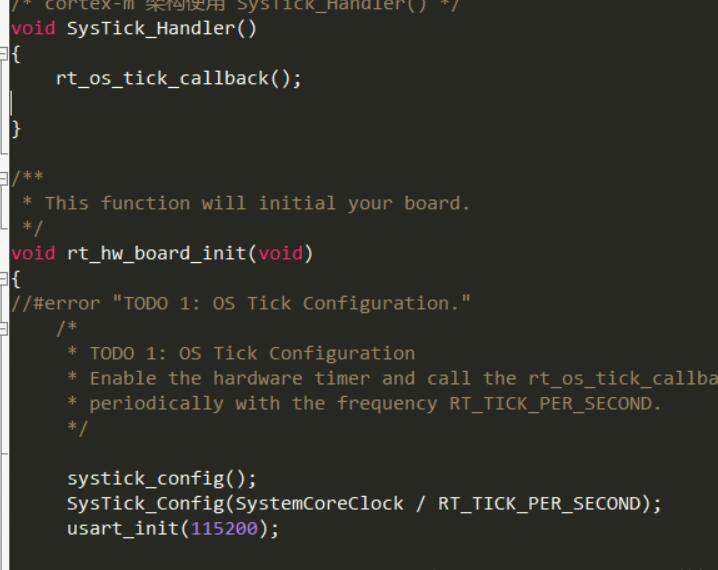
- board.c处理
- 屏蔽"gd32f4xx_it.c"中HardFault_Handler、PendSV_Handler、 SysTick_Handler函数
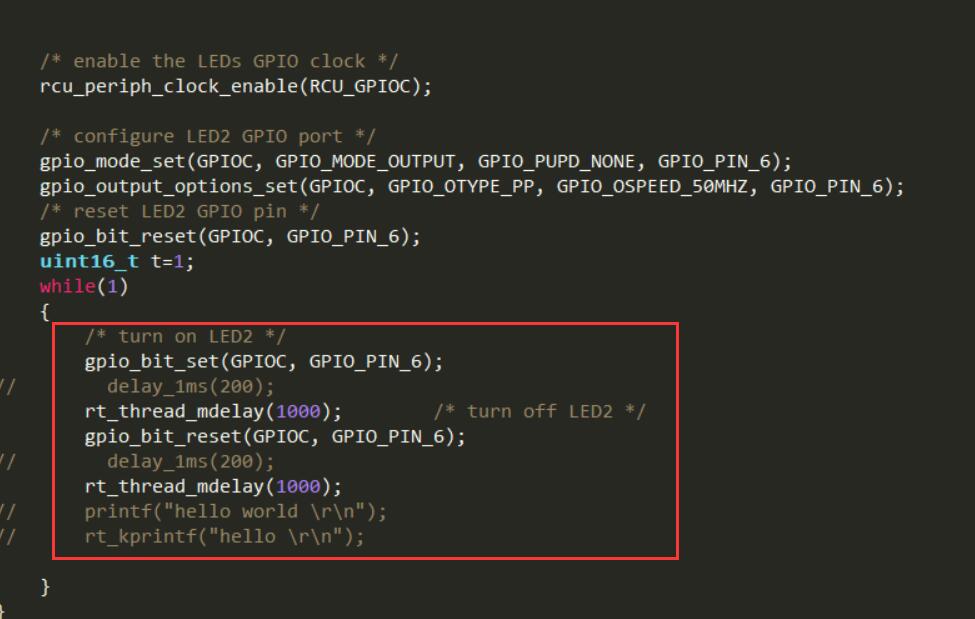
- 将裸机的延时函数换成操作系统的延时函数
添加Finsh
- 在添加Finsh前先准备串口
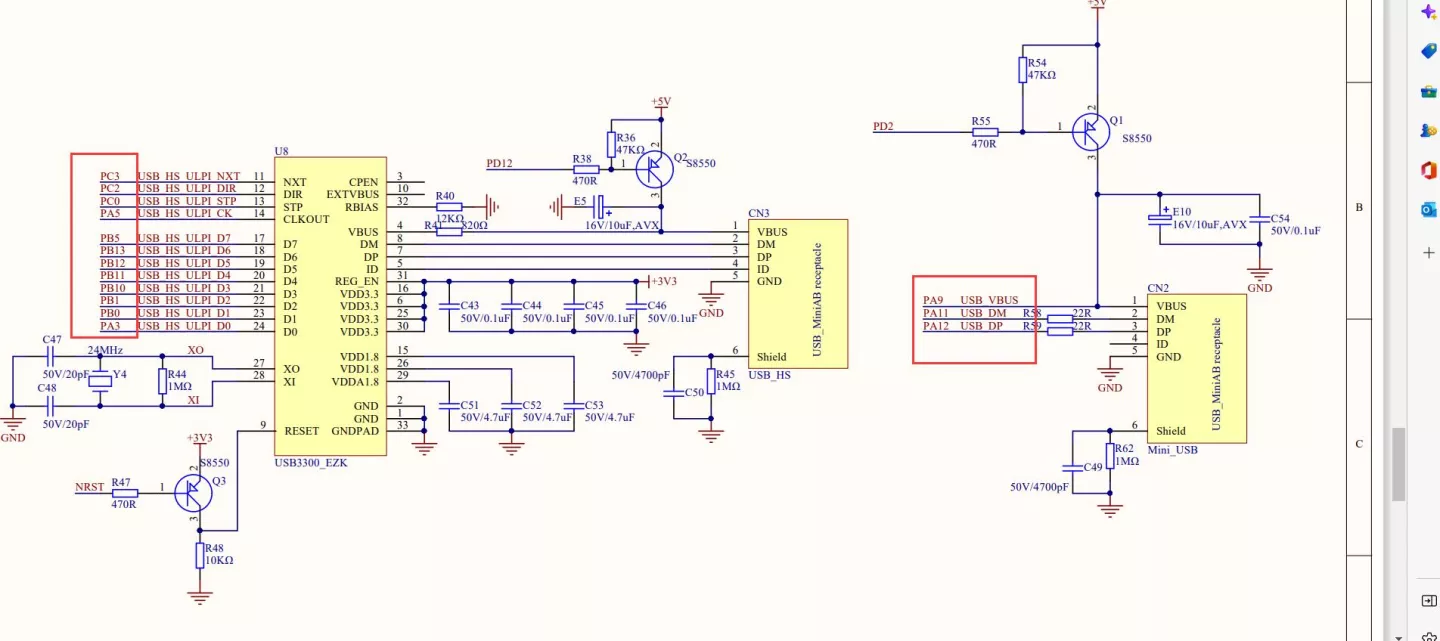
这里一点需要注意的地方,先上原理图在解释,PA9和PA3已经被占用,使用串口跳过这两个引脚
#include "usart.h"
#include
#include //int fputc(int ch, FILE *f)//{// /* 将Printf内容发往串口 */// usart_data_transmit(USART1, (unsigned char) ch);while (!(USART1->SR & USART_FLAG_TXE));// while( usart_flag_get(USART1,USART_FLAG_TC)!= SET); // return (ch);//}void usart_init(int32_t bound)
{rcu_periph_clock_enable( RCU_GPIOD);/* enable USART clock */rcu_periph_clock_enable(RCU_USART1);/* connect port to USARTx_Tx */gpio_af_set(GPIOD, GPIO_AF_7, GPIO_PIN_5);/* connect port to USARTx_Rx */gpio_af_set(GPIOD, GPIO_AF_7, GPIO_PIN_6);/* configure USART Tx as alternate function push-pull */gpio_mode_set(GPIOD, GPIO_MODE_AF, GPIO_PUPD_PULLUP,GPIO_PIN_5);gpio_output_options_set(GPIOD, GPIO_OTYPE_PP, GPIO_OSPEED_50MHZ,GPIO_PIN_5);/* configure USART Rx as alternate function push-pull */gpio_mode_set(GPIOD, GPIO_MODE_AF, GPIO_PUPD_PULLUP,GPIO_PIN_6);gpio_output_options_set(GPIOD, GPIO_OTYPE_PP, GPIO_OSPEED_50MHZ,GPIO_PIN_6);/* USART configure */usart_deinit(USART1);usart_baudrate_set(USART1,bound);usart_receive_config(USART1, USART_RECEIVE_ENABLE);usart_transmit_config(USART1, USART_TRANSMIT_ENABLE);// nvic_irq_enable(USART1_IRQn, 2, 0);//设置串口中断的优先级
// //开启串口接收中断
// usart_interrupt_enable(USART1, USART_INT_RBNE);usart_enable(USART1);
}//void USART1_IRQHandler(void)
//{
// uint8_t rx_data = 0;
// //当接收中断发生
// if((RESET != usart_interrupt_flag_get(USART1, USART_INT_FLAG_RBNE)) &&
// (RESET != usart_flag_get(USART1, USART_FLAG_RBNE))){
// /* Read one byte from the receive data register */
// rx_data = (uint8_t)usart_data_receive(USART1);//获取接收到的数据rt_kprintf("rx_data is %d",rx_data);
// }
//
// //当发送中断发生
// if((RESET != usart_flag_get(USART1, USART_FLAG_TBE)) &&
// (RESET != usart_interrupt_flag_get(USART1, USART_INT_FLAG_TBE))){
// /* Write one byte to the transmit data register */
// }
//}
- 添加Finsh源码
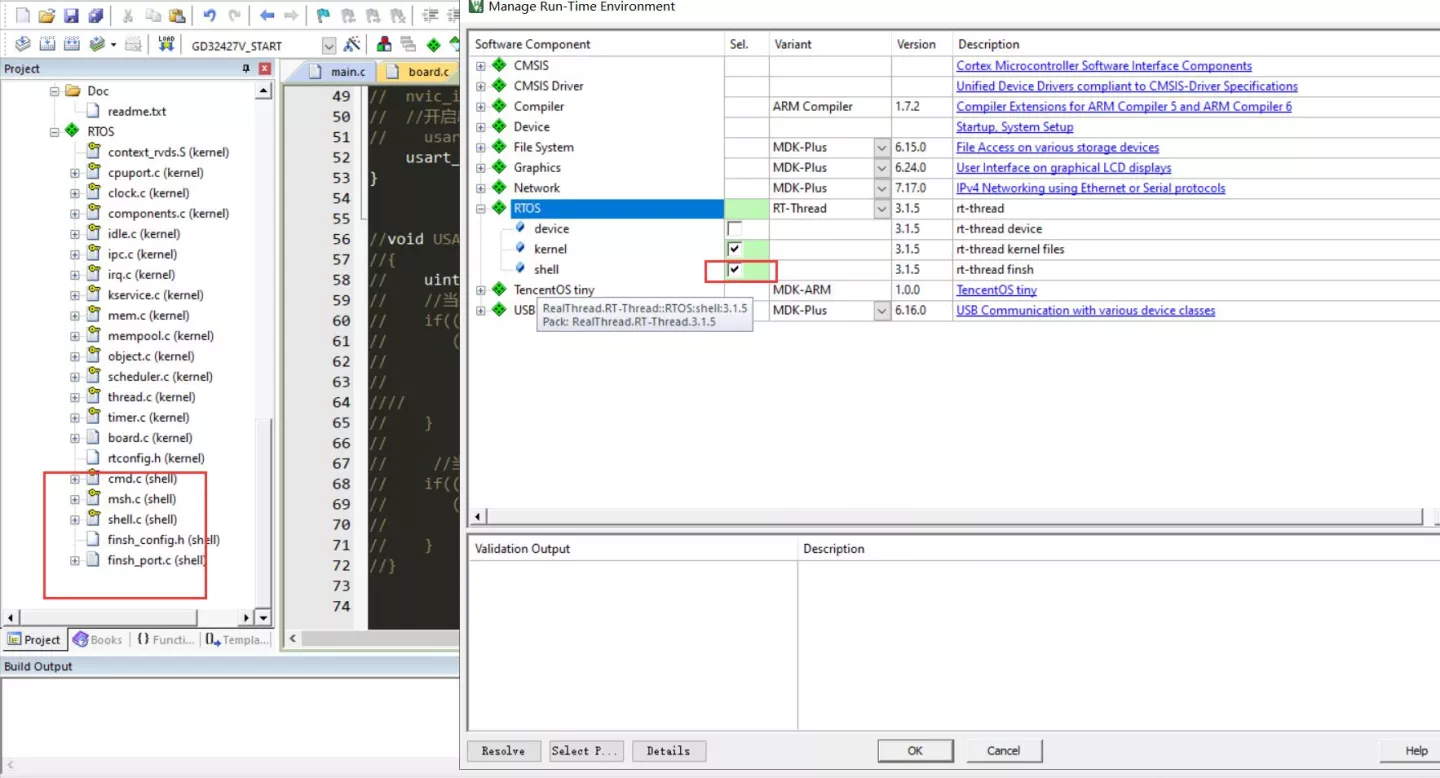
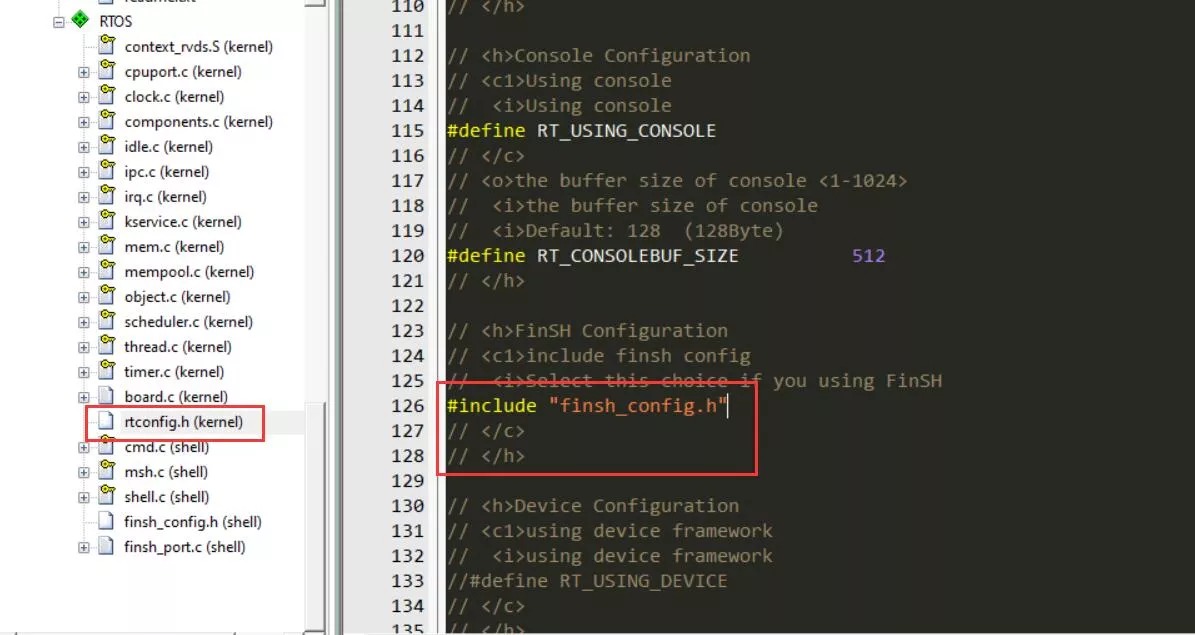
- 在rtconfig.h中打开finsh_config.h
- board.c中初始化串口
/** Copyright (c) 2006-2019, RT-Thread Development Team** SPDX-License-Identifier: Apache-2.0** Change Logs:* Date Author Notes* 2021-05-24 the first version*/#include
#include
#include "systick.h"
#include "gd32f4xx.h"
#include "usart.h"#if defined(RT_USING_USER_MAIN) && defined(RT_USING_HEAP)
/** Please modify RT_HEAP_SIZE if you enable RT_USING_HEAP* the RT_HEAP_SIZE max value = (sram size - ZI size), 1024 means 1024 bytes*/
#define RT_HEAP_SIZE (20*1024)
static rt_uint8_t rt_heap[RT_HEAP_SIZE];RT_WEAK void *rt_heap_begin_get(void)
{return rt_heap;
}RT_WEAK void *rt_heap_end_get(void)
{return rt_heap + RT_HEAP_SIZE;
}
#endifvoid rt_os_tick_callback(void)
{rt_interrupt_enter();rt_tick_increase();rt_interrupt_leave();
}/* cortex-m 架构使用 SysTick_Handler() */
void SysTick_Handler()
{rt_os_tick_callback();}/*** This function will initial your board.*/
void rt_hw_board_init(void)
{
//#error "TODO 1: OS Tick Configuration."/* * TODO 1: OS Tick Configuration* Enable the hardware timer and call the rt_os_tick_callback function* periodically with the frequency RT_TICK_PER_SECOND. */systick_config();SysTick_Config(SystemCoreClock / RT_TICK_PER_SECOND);usart_init(115200);/* Call components board initial (use INIT_BOARD_EXPORT()) */
#ifdef RT_USING_COMPONENTS_INITrt_components_board_init();
#endif#if defined(RT_USING_USER_MAIN) && defined(RT_USING_HEAP)rt_system_heap_init(rt_heap_begin_get(), rt_heap_end_get());
#endif
}#ifdef RT_USING_CONSOLE//static int uart_init(void)
//{
//#error "TODO 2: Enable the hardware uart and config baudrate."
// return 0;
//}
//INIT_BOARD_EXPORT(uart_init);void uart_send_byte(rt_uint8_t data)
{while( usart_flag_get(USART1,USART_FLAG_TC)!= SET); usart_data_transmit(USART1, (unsigned char) data);}void rt_hw_console_output(const char *str)
{
//#error "TODO 3: Output the string 'str' through the uart."rt_size_t i = 0, size = 0;char a = '\r';// __HAL_UNLOCK(&UartHandle);size = rt_strlen(str);for (i = 0; i < size; i++){if (*(str + i) == '\n'){uart_send_byte(a);}uart_send_byte( *(str + i) );}
}#endif - 在finsh_port.c中添加接收代码
/** Copyright (c) 2006-2021, RT-Thread Development Team** SPDX-License-Identifier: Apache-2.0** Change Logs:* Date Author Notes*/#include
#include
#include "usart.h"#ifndef RT_USING_FINSH
#error Please uncomment the line <#include "finsh_config.h"> in the rtconfig.h
#endif#ifdef RT_USING_FINSHRT_WEAK char rt_hw_console_getchar(void)
{/* Note: the initial value of ch must < 0 */int ch = -1;//#error "TODO 4: Read a char from the uart and assign it to 'ch'."if( usart_flag_get(USART1,USART_FLAG_RBNE) != RESET) //接收中断(接收到的数据必须是0x0d 0x0a结尾){ch = (uint8_t)usart_data_receive(USART1) & 0xff;
// rt_kprintf("ch is %d",ch);}else {if( usart_flag_get(USART1, USART_FLAG_ORERR) != RESET) //{usart_flag_clear(USART1, USART_FLAG_RBNE);}rt_thread_mdelay(10);}return ch;
}#endif /* RT_USING_FINSH */ 运行结果
- 下载程序,打开终端
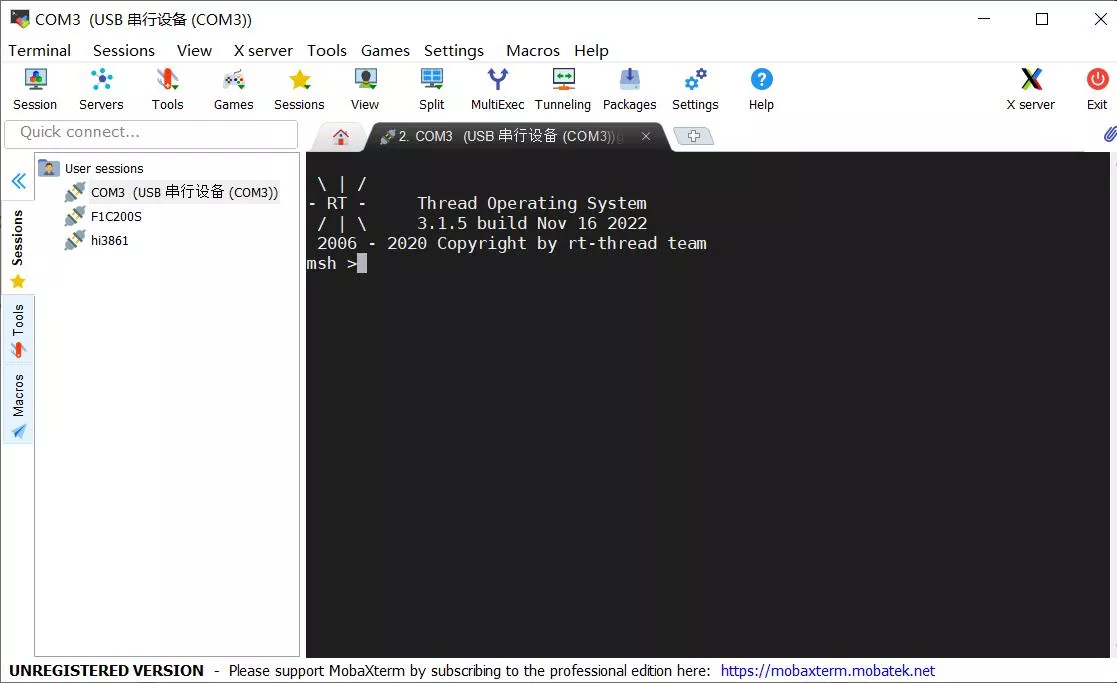
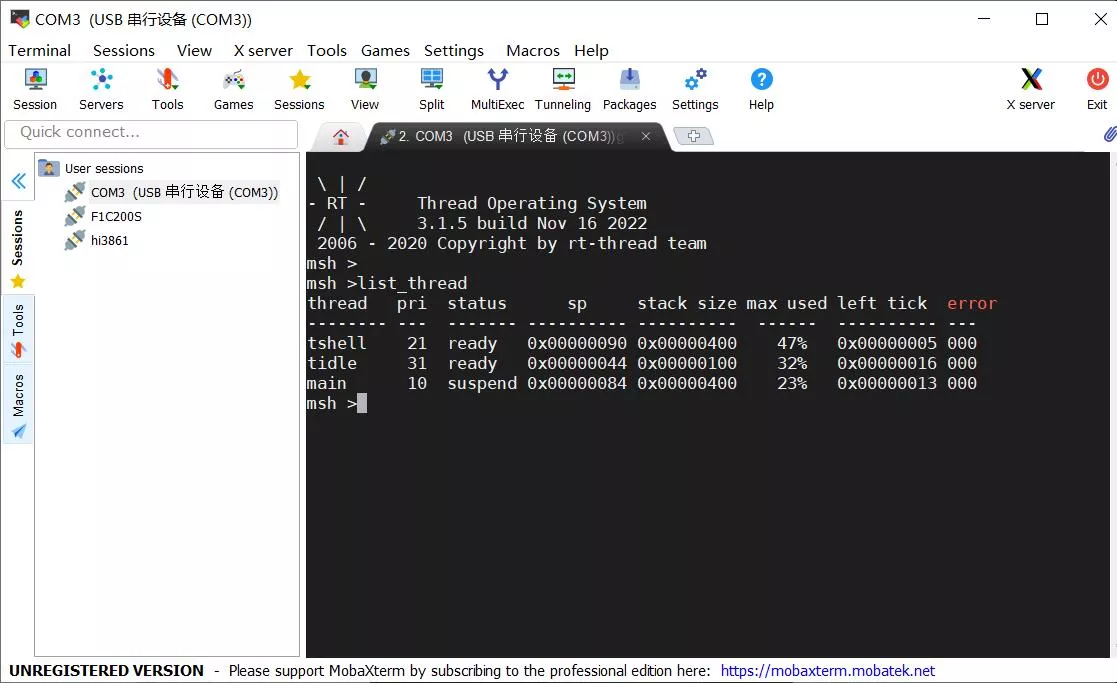
- 输入一个命令list_thread
相关内容
热门资讯
北京的名胜古迹 北京最著名的景...
北京从元代开始,逐渐走上帝国首都的道路,先是成为大辽朝五大首都之一的南京城,随着金灭辽,金代从海陵王...
苗族的传统节日 贵州苗族节日有...
【岜沙苗族芦笙节】岜沙,苗语叫“分送”,距从江县城7.5公里,是世界上最崇拜树木并以树为神的枪手部落...
长白山自助游攻略 吉林长白山游...
昨天介绍了西坡的景点详细请看链接:一个人的旅行,据说能看到长白山天池全凭运气,您的运气如何?今日介绍...
应用未安装解决办法 平板应用未...
---IT小技术,每天Get一个小技能!一、前言描述苹果IPad2居然不能安装怎么办?与此IPad不...
demo什么意思 demo版本...
618快到了,各位的小金库大概也在准备开闸放水了吧。没有小金库的,也该向老婆撒娇卖萌服个软了,一切只...
脚上的穴位图 脚面经络图对应的...
人体穴位作用图解大全更清晰直观的标注了各个人体穴位的作用,包括头部穴位图、胸部穴位图、背部穴位图、胳...
世界上最漂亮的人 世界上最漂亮...
此前在某网上,选出了全球265万颜值姣好的女性。从这些数量庞大的女性群体中,人们投票选出了心目中最美...
猫咪吃了塑料袋怎么办 猫咪误食...
你知道吗?塑料袋放久了会长猫哦!要说猫咪对塑料袋的喜爱程度完完全全可以媲美纸箱家里只要一有塑料袋的响...
埃菲尔铁塔在哪 中国仿建埃菲尔...
2019年4月26日,广西南宁市,街头惊现一座巨型山寨版埃菲尔铁塔,高约20米,白色塔身,造型逼真,...
苗族的传统节日 贵州苗族节日有...
【岜沙苗族芦笙节】岜沙,苗语叫“分送”,距从江县城7.5公里,是世界上最崇拜树木并以树为神的枪手部落...
北京的名胜古迹 北京最著名的景...
北京从元代开始,逐渐走上帝国首都的道路,先是成为大辽朝五大首都之一的南京城,随着金灭辽,金代从海陵王...
demo什么意思 demo版本...
618快到了,各位的小金库大概也在准备开闸放水了吧。没有小金库的,也该向老婆撒娇卖萌服个软了,一切只...
应用未安装解决办法 平板应用未...
---IT小技术,每天Get一个小技能!一、前言描述苹果IPad2居然不能安装怎么办?与此IPad不...