
并发与竞争(三)自旋锁
创始人
2024-03-25 02:57:22
文章目录
- 自旋锁的概念
- 什么是自旋锁?
- 自旋锁的API函数(一)
- 自旋锁的使用步骤
- 其他自旋锁API函数(二)
- 自旋锁的注意事项
- 内核中自旋锁的实例
- 自旋锁死锁
- 写代码
- 临界区在哪?
- 最简单的实现逻辑
- 完整实现
自旋锁的概念
什么是自旋锁?
自旋锁是为了实现保护共享资源提出的一种锁机制,也是内核中比较常见的锁机制。自旋锁是以“原地等待”的方式解决资源冲突。即当线程A获取到自旋锁以后,此时线程B也想获取到自旋锁。但是线程B获取不到,只能“原地打转”(仍然占用CPU,不会休眠),不断尝试获取自旋锁,直到获取成功,然后才退出循环。
只有一个厕所,A想去厕所,B已经在厕所了,所以A只能在外面等待B,知道B上完厕所出来,A才能进去上厕所。
自旋锁的API函数(一)
| 函数 | 描述 |
|---|---|
| DEFINE_SPINLOCK(spinlock_t *lock) | 定义并初始化一个变量 |
| int spin_lock_init(spinlock_t *lock) | 初始化自旋锁 |
| void spin_lock(spinlock_t *lock) | 获取自旋锁,也叫做加锁 |
| void spin_unlock(spinlock_t *lock) | 释放自旋锁,也叫做解锁 |
| int spin_trylock(spinlock_t *lock) | 尝试获取自旋锁,如果没有获取到就返回0 |
| int spin_is_locked(spinlock_t *lock) | 检查自旋锁是否被获取,如果没有被获取就返回非0,否则返回0 |
自旋锁的使用步骤
- 在访问临界资源的时候先申请自旋锁
- 获取到自旋锁以后就进入临界区,获取不到自旋锁就“原地等待”
- 退出临界区的时候要释放自旋锁
其他自旋锁API函数(二)
| 函数 | 描述 |
|---|---|
| void spin_lock_irq(spinlock_t *lock) | 关闭中断并获取自旋锁 |
| void spin_unlock_irq(spinlock_t *lock) | 打开中断并释放自旋锁 |
| void spin_lock_irqsave(spinlock_t *lock, unsigned long flags) | 保存中断状态,关闭中断并获取自旋锁 |
| void spin_unlock_irqrestore(spinlock_t *lock, unsigned long flags) | 恢复之前保存的中断状态,打开中断并释放自旋锁 |
| void spin_lock_bh(spinlock_t *lock) | 关闭下半部,获取自旋锁 |
| void spin_unlock_bh(spinlock_t *lock) | 打开下半部,获取自旋锁 |
自旋锁的注意事项
- 由于自旋锁会“原地等待”,因为“原地等待”会继续占用CPU,会消耗CPU资源。所以锁的时间不能太长,也就是临界区的代码不能太多。
- 在自旋锁保护的临界区里面不能调用可能会导致线程休眠的函数,否则可能会发生死锁。
- 自旋锁一般是用在多核的SOC上面。
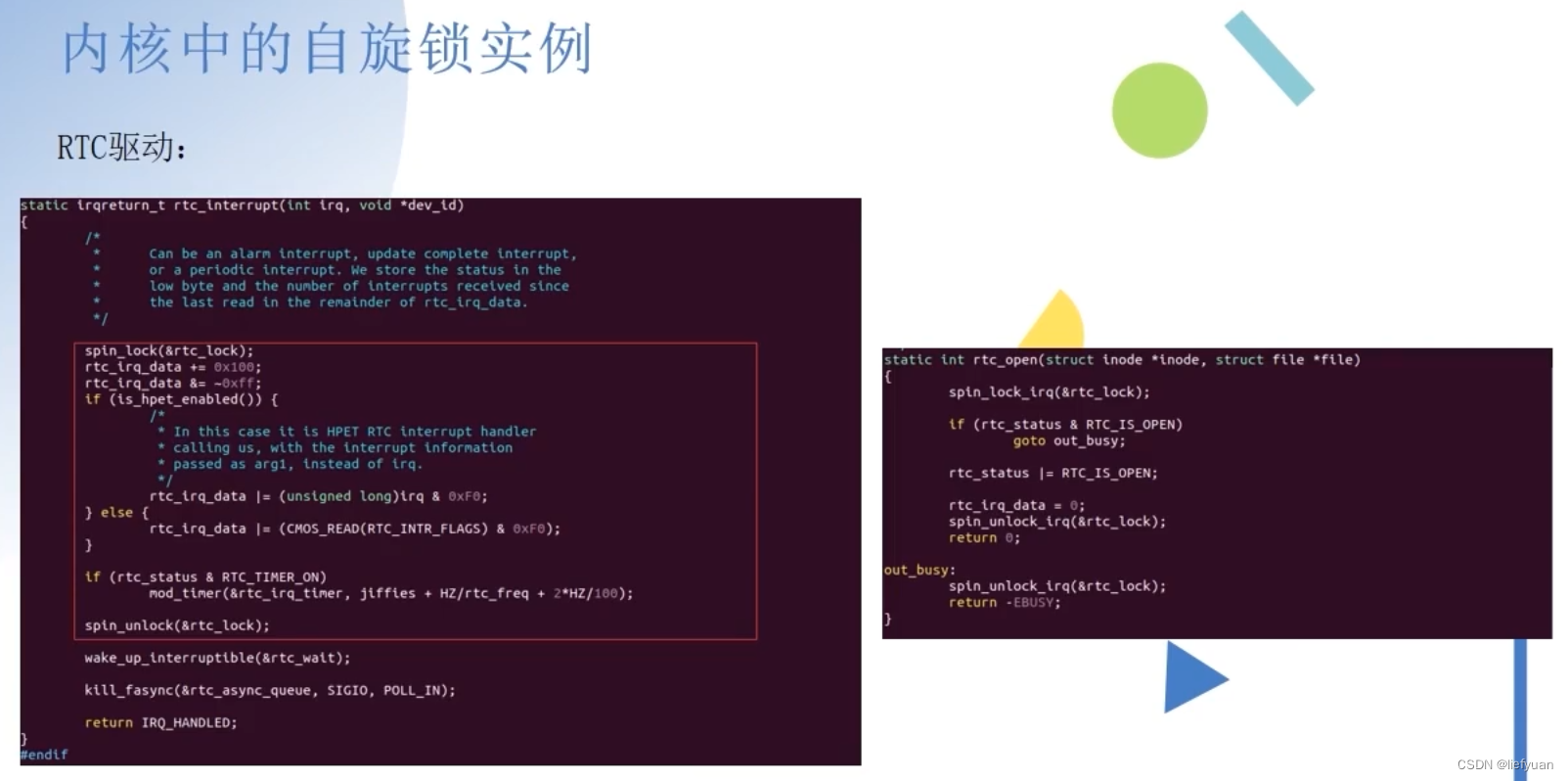
内核中自旋锁的实例
自旋锁死锁
在多核CPU或者支持抢占的单核CPU中,被自旋锁保护的临界区不能调用任何能够引起睡眠或者阻塞的函数,否则可能会发生死锁。
使用自旋锁会禁止抢占。比如在单核CPU中,A进程获取到自旋锁以后暂时关闭内核抢占,如果A进程此时进入了休眠(放弃了CPU的使用权),B进程此时也想获取到自旋锁,但是此时自旋锁被进程A持有,而且此时CPU的抢占被禁止了。因为是单核,进程B就无法被调度出去,只能在“原地旋转”等在锁被A释放。但是进程A无法运行,锁也就无法释放。死锁就发生了。
多核CPU不会发生上面的情况。因为其他的核会调度其他的进程。
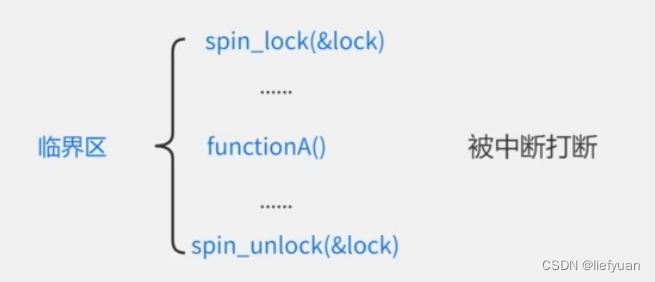
当进程A获取到自旋锁以后,如果产生了中断,并且在中断里面也要访问共享资源(中断里面可以用自旋锁),此时中断里面无法获取到自旋锁,只能“原地旋转”,产生死锁。为了避免这种情况发生,可以使用spin_lock_irqsave等API来禁止中断并获取自旋锁。
写代码
临界区在哪?
...
static spinlock_t spinlock;
static int flag = 1;int misc_open(struct inode *inode,struct file *file)
{spin_lock(&spinlock);/***********临界区开始***********//**********临界区结束***********/spin_unlock(&spinlock);printk("hello misc_open\n ");return 0;
}
...
如上,在加自旋锁和解自旋锁中间的区域就是“临界区域”。
最简单的实现逻辑
static spinlock_t spinlock;
static int flag = 1;int misc_open(struct inode *inode,struct file *file)
{spin_lock(&spinlock);if(flag != 1) // 第一次程序进来不会有任何问题{spin_unlock(&spinlock);return -EBUSY;}flag = 0; // 第一次进来的程序会置该标志位,让后面的程序无法进来。spin_unlock(&spinlock);printk("hello misc_open\n ");return 0;
}int misc_release(struct inode *inode,struct file *file)
{spin_lock(&spinlock);if(flag != 1)flag = 1;spin_unlock(&spinlock);printk("hello misc_relaease bye bye \n ");return 0;
}
- 如上,这是一个设备节点的驱动,第一次程序A打开了该驱动是可以顺利打开的不会有问题,并且打开后就会把全局变量
flag = 0,这样其他程序再想打开该驱动就会失败并返回错误。 - 程序A用完了该驱动就会将
flag = 1,从而后面的程序可以打开该驱动。 - 逻辑相当简单,就是操作与判断
flag的逻辑必须在临界区里面执行。
一种特殊情况:
- 程序A打开了驱动,代码跑到了
flag = 0;也就是flag还没有完全赋值的时候,来了程序B也要打开驱动,由于自旋锁锁定机制,它只能在临界区外spin_lock(&spinlock); //在这里等待等待。直到程序A跑完临界区,flag也被设置为了1,然后程序B还是无法打开驱动了!目的就达到了。
完整实现
led.c
#include //初始化头文件
#include //最基本的文件,支持动态添加和卸载模块。
#include //包含了miscdevice结构的定义及相关的操作函数。
#include //文件系统头文件,定义文件表结构(file,buffer_head,m_inode等)
#include //包含了copy_to_user、copy_from_user等内核访问用户进程内存地址的函数定义。
#include //包含了ioremap、iowrite等内核访问IO内存等函数的定义。
#include //驱动要写入内核,与内核相关的头文件#include
#include #define GPIO_DR 0xfdd60000 //LED物理地址,通过查看原理图得知
unsigned int *vir_gpio_dr; //存放映射完的虚拟地址的首地址static spinlock_t spinlock;
static int flag = 1;int misc_open(struct inode *inode,struct file *file)
{spin_lock(&spinlock);if(flag != 1){spin_unlock(&spinlock);return -EBUSY;}flag = 0;spin_unlock(&spinlock);printk("hello misc_open\n ");return 0;
}int misc_release(struct inode *inode,struct file *file)
{spin_lock(&spinlock);flag = 1;spin_unlock(&spinlock);printk("hello misc_relaease bye bye \n ");return 0;
}ssize_t misc_read (struct file *file, char __user *ubuf, size_t size, loff_t *loff_t)
{printk("misc_read\n ");return 0;
}ssize_t misc_write (struct file *file, const char __user *ubuf, size_t size, loff_t *loff_t)
{ /*应用程序传入数据到内核空间,然后控制蜂鸣器的逻辑,在此添加*/// kbuf保存的是从应用层读取到的数据char kbuf[64] = {0};// copy_from_user 从应用层传递数据给内核层if(copy_from_user(kbuf,ubuf,size)!= 0) {// copy_from_user 传递失败打印printk("copy_from_user error \n ");return -1;}//打印传递进内核的数据//printk("kbuf is %d\n ",kbuf[0]); if(kbuf[0]==1) //传入数据为1 ,LED亮{*vir_gpio_dr = 0x80008000; }else if(kbuf[0]==0) //传入数据为0,LED灭*vir_gpio_dr = 0x80000000;return 0;
}//文件操作集
struct file_operations misc_fops={.owner = THIS_MODULE,.open = misc_open,.release = misc_release,.read = misc_read,.write = misc_write,
};
//miscdevice结构体
struct miscdevice misc_dev = {.minor = MISC_DYNAMIC_MINOR,.name = "hello_misc",.fops = &misc_fops,
};
static int misc_init(void)
{int ret;//注册杂项设备ret = misc_register(&misc_dev);if(ret<0){printk("misc registe is error \n");}printk("misc registe is succeed \n");//将物理地址转化为虚拟地址vir_gpio_dr = ioremap(GPIO_DR,4);if(vir_gpio_dr == NULL){printk("GPIO_DR ioremap is error \n");return EBUSY;}printk("GPIO_DR ioremap is ok \n"); return 0;
}
static void misc_exit(void){//卸载杂项设备misc_deregister(&misc_dev);iounmap(vir_gpio_dr);printk(" misc gooodbye! \n");
}
module_init(misc_init);
module_exit(misc_exit);
MODULE_LICENSE("GPL");
Makefile
obj-m += led.o
KDIR =/home/liefyuan/Linux/rk356x_linux/kernel
PWD ?= $(shell pwd)
all:make -C $(KDIR) M=$(PWD) modules modules ARCH=arm64 CROSS_COMPILE=/usr/local/arm64/gcc-linaro-6.3.1-2017.05-x86_64_aarch64-linux-gnu/bin/aarch64-linux-gnu-
clean:rm -rf modules.order *.o workqueue.o Module.symvers *.mod.c *.ko
编译模块:
$ export ARCH=arm64
$ export CROSS_COMPILE=aarch64-linux-gnu-
$ make
测试应用:
app.c
#include
#include
#include
#include
#include int main(int argc,char *argv[])
{int fd;char buf[64] = {0};//定义buf缓存char val[1];//打开设备节点fd = open("/dev/hello_misc",O_RDWR);if(fd < 0){//打开设备节点失败perror("open error \n"); return fd;}sleep(10);close(fd);return 0;
}
app2.c
#include
#include
#include
#include
#include int main(int argc,char *argv[])
{int fd;char buf[64] = {0};//定义buf缓存char val[1];//打开设备节点fd = open("/dev/hello_misc",O_RDWR);if(fd < 0){//打开设备节点失败perror("open error \n"); return fd;}//把缓冲区数据写入文件中while(1){val[0] = 1;write(fd, val, sizeof(val));sleep(1);val[0] = 0;write(fd, val, sizeof(val));sleep(1);}close(fd);return 0;
}
编译:
aarch64-linux-gnu-gcc app.c -o app.armelf
aarch64-linux-gnu-gcc app2.c -o app2.armelf
测试:
[root@RK356X:/opt]# insmod led.ko
[ 787.424679] misc registe is succeed
[ 787.425141] GPIO_DR ioremap is ok[root@RK356X:/opt]# ./app.armelf &[root@RK356X:/opt]# ./app2.armelf
open error
: Device or resource busy
[root@RK356X:/opt]# ./app2.armelf [ 805.822972] hello misc_open
[ 805.822972][ 815.824861] hello misc_relaease bye bye
[ 815.824861]
[ 818.127234] hello misc_open
[ 818.127234]- 实现的逻辑:程序app运行起来以后会占用驱动10秒钟,这十秒内app2是无法打开驱动的,直到app释放掉自旋锁以后才可以被app2打开。
下一篇:MySQL插入汉字报错的解决方案
相关内容
热门资讯
埃菲尔铁塔在哪 中国仿建埃菲尔...
2019年4月26日,广西南宁市,街头惊现一座巨型山寨版埃菲尔铁塔,高约20米,白色塔身,造型逼真,...
北京的名胜古迹 北京最著名的景...
北京从元代开始,逐渐走上帝国首都的道路,先是成为大辽朝五大首都之一的南京城,随着金灭辽,金代从海陵王...
苗族的传统节日 贵州苗族节日有...
【岜沙苗族芦笙节】岜沙,苗语叫“分送”,距从江县城7.5公里,是世界上最崇拜树木并以树为神的枪手部落...
长白山自助游攻略 吉林长白山游...
昨天介绍了西坡的景点详细请看链接:一个人的旅行,据说能看到长白山天池全凭运气,您的运气如何?今日介绍...
世界上最漂亮的人 世界上最漂亮...
此前在某网上,选出了全球265万颜值姣好的女性。从这些数量庞大的女性群体中,人们投票选出了心目中最美...
应用未安装解决办法 平板应用未...
---IT小技术,每天Get一个小技能!一、前言描述苹果IPad2居然不能安装怎么办?与此IPad不...
脚上的穴位图 脚面经络图对应的...
人体穴位作用图解大全更清晰直观的标注了各个人体穴位的作用,包括头部穴位图、胸部穴位图、背部穴位图、胳...
猫咪吃了塑料袋怎么办 猫咪误食...
你知道吗?塑料袋放久了会长猫哦!要说猫咪对塑料袋的喜爱程度完完全全可以媲美纸箱家里只要一有塑料袋的响...
demo什么意思 demo版本...
618快到了,各位的小金库大概也在准备开闸放水了吧。没有小金库的,也该向老婆撒娇卖萌服个软了,一切只...
北京的名胜古迹 北京最著名的景...
北京从元代开始,逐渐走上帝国首都的道路,先是成为大辽朝五大首都之一的南京城,随着金灭辽,金代从海陵王...
埃菲尔铁塔在哪 中国仿建埃菲尔...
2019年4月26日,广西南宁市,街头惊现一座巨型山寨版埃菲尔铁塔,高约20米,白色塔身,造型逼真,...
世界上最漂亮的人 世界上最漂亮...
此前在某网上,选出了全球265万颜值姣好的女性。从这些数量庞大的女性群体中,人们投票选出了心目中最美...
苗族的传统节日 贵州苗族节日有...
【岜沙苗族芦笙节】岜沙,苗语叫“分送”,距从江县城7.5公里,是世界上最崇拜树木并以树为神的枪手部落...
长白山自助游攻略 吉林长白山游...
昨天介绍了西坡的景点详细请看链接:一个人的旅行,据说能看到长白山天池全凭运气,您的运气如何?今日介绍...
猫咪吃了塑料袋怎么办 猫咪误食...
你知道吗?塑料袋放久了会长猫哦!要说猫咪对塑料袋的喜爱程度完完全全可以媲美纸箱家里只要一有塑料袋的响...
应用未安装解决办法 平板应用未...
---IT小技术,每天Get一个小技能!一、前言描述苹果IPad2居然不能安装怎么办?与此IPad不...
脚上的穴位图 脚面经络图对应的...
人体穴位作用图解大全更清晰直观的标注了各个人体穴位的作用,包括头部穴位图、胸部穴位图、背部穴位图、胳...
demo什么意思 demo版本...
618快到了,各位的小金库大概也在准备开闸放水了吧。没有小金库的,也该向老婆撒娇卖萌服个软了,一切只...