
基于stm32微控制器的绘图机器人设计
目录
第一章 绪论 1
-
基于 stm32 微控制器的绘图机器人研究设计的目的 1
-
基于 stm32 微控制器的绘图机器人研究设计的设计功能 1
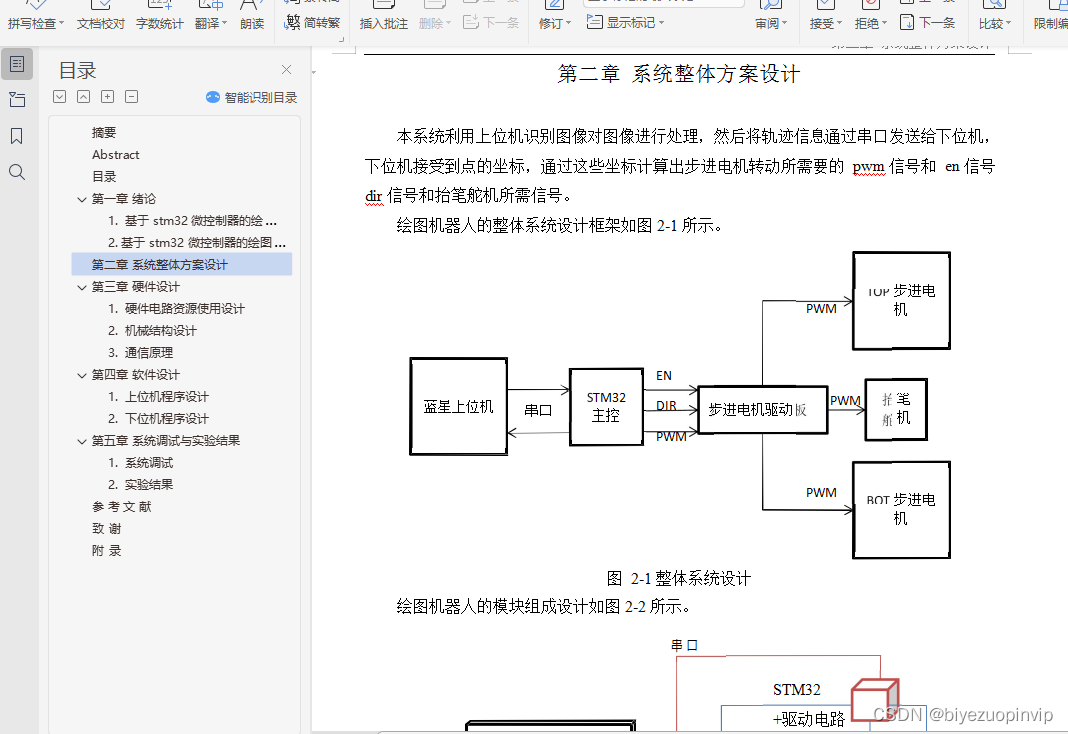
第二章 系统整体方案设计 2
第三章 硬件设计 4 -
硬件电路资源使用设计 4
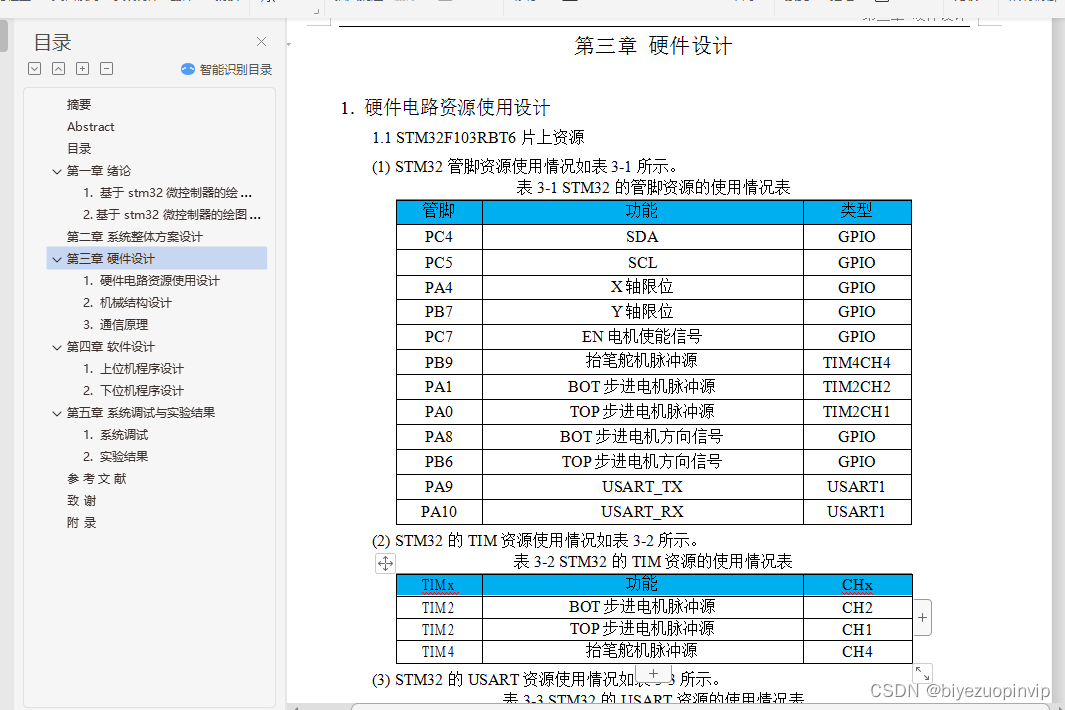
1.1 STM32F103RBT6 片上资源 4
1.2 外围芯片资源 4 -
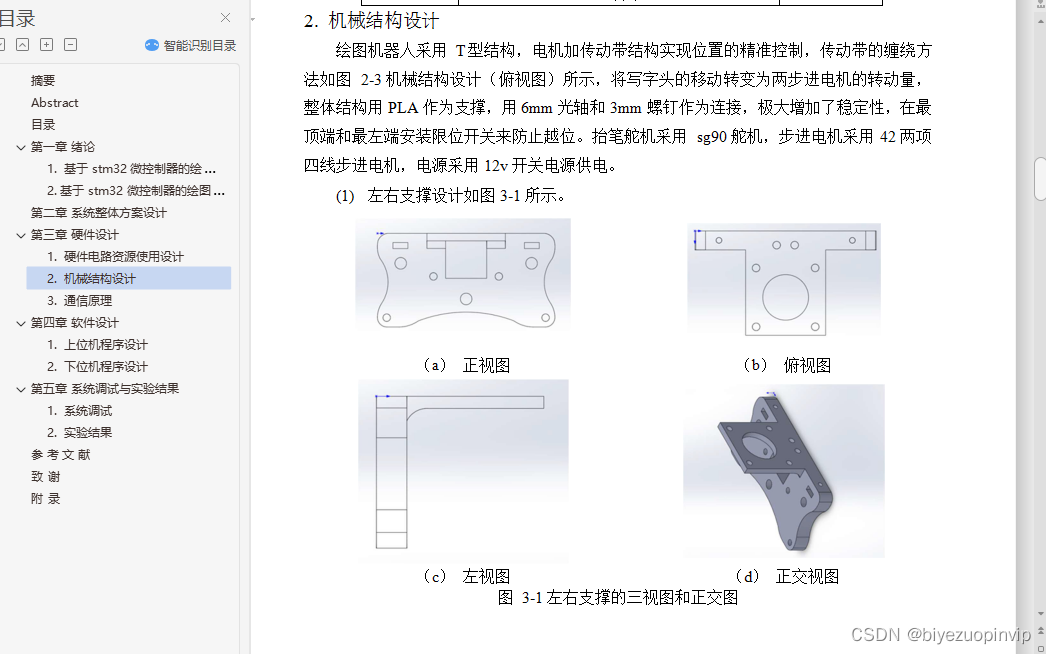
机械结构设计 5
-
通信原理 9
第四章 软件设计 11 -
上位机程序设计 11
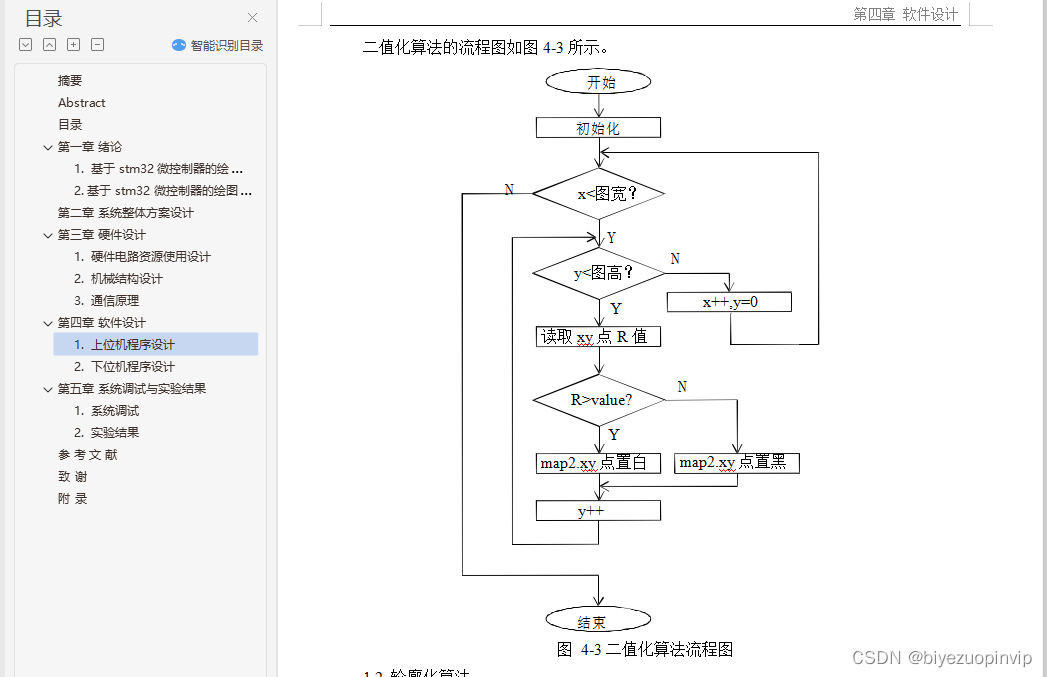
1.1 二值化算法 11
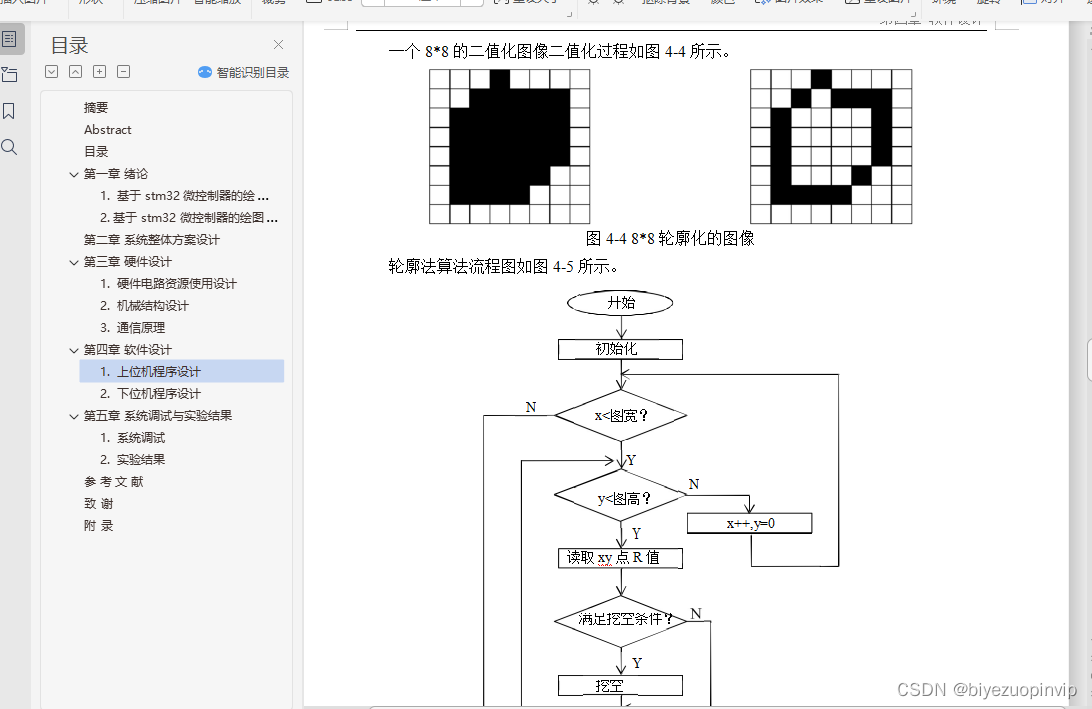
1.2 轮廓化算法 13
1.3 描边算法 14
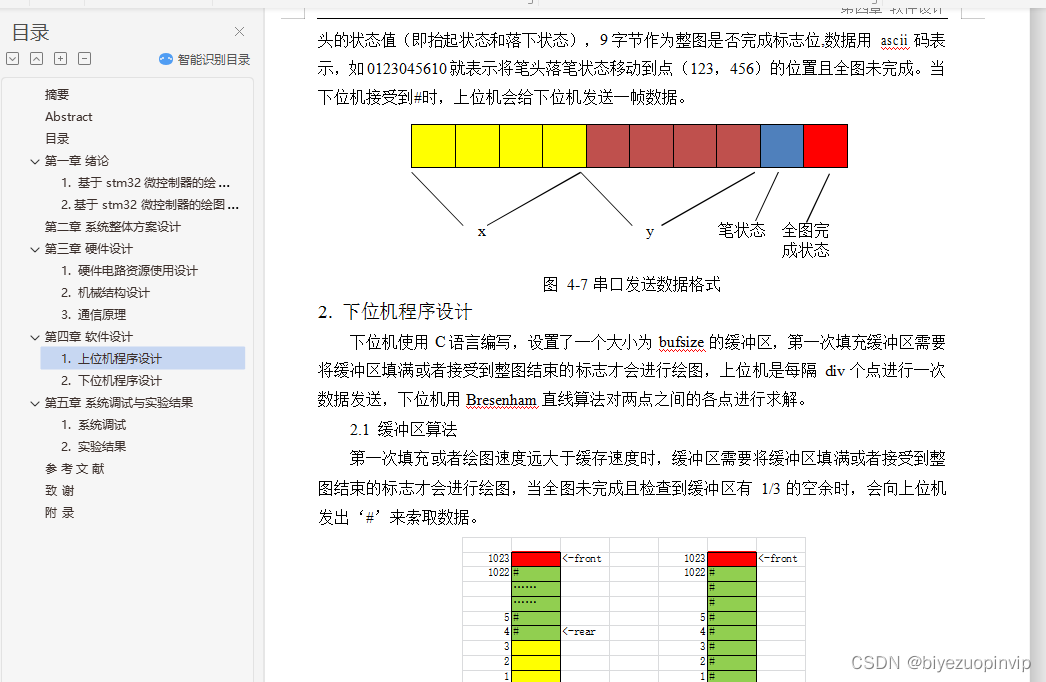
1.4 串口通信数据格式 16 -
下位机程序设计 17
2.1 缓冲区算法 17
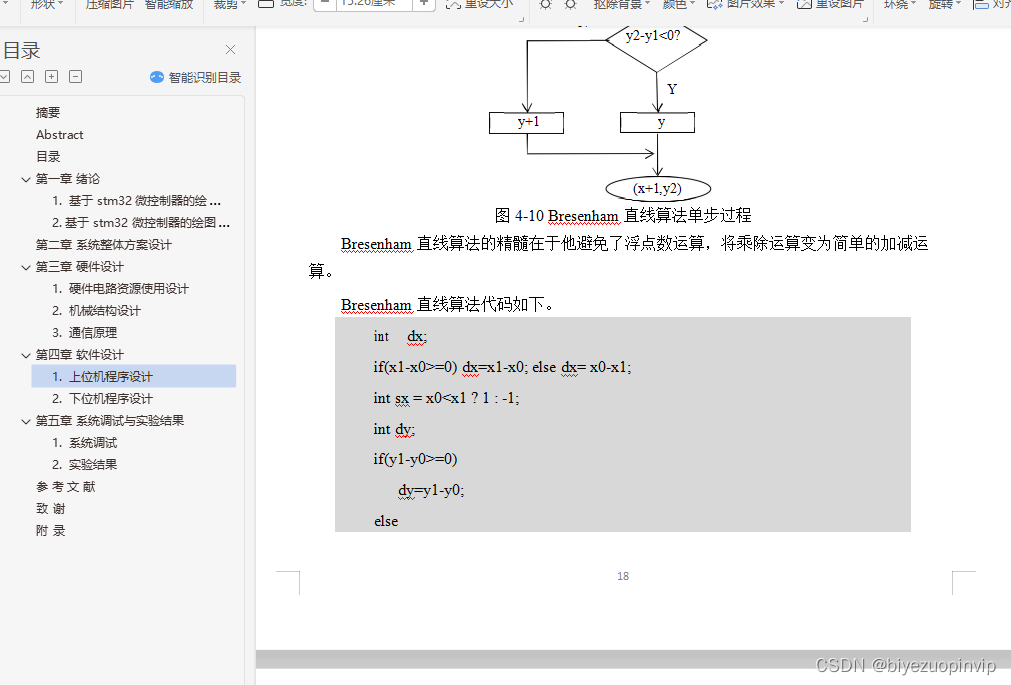
2.2 Bresenham 直线算法 17
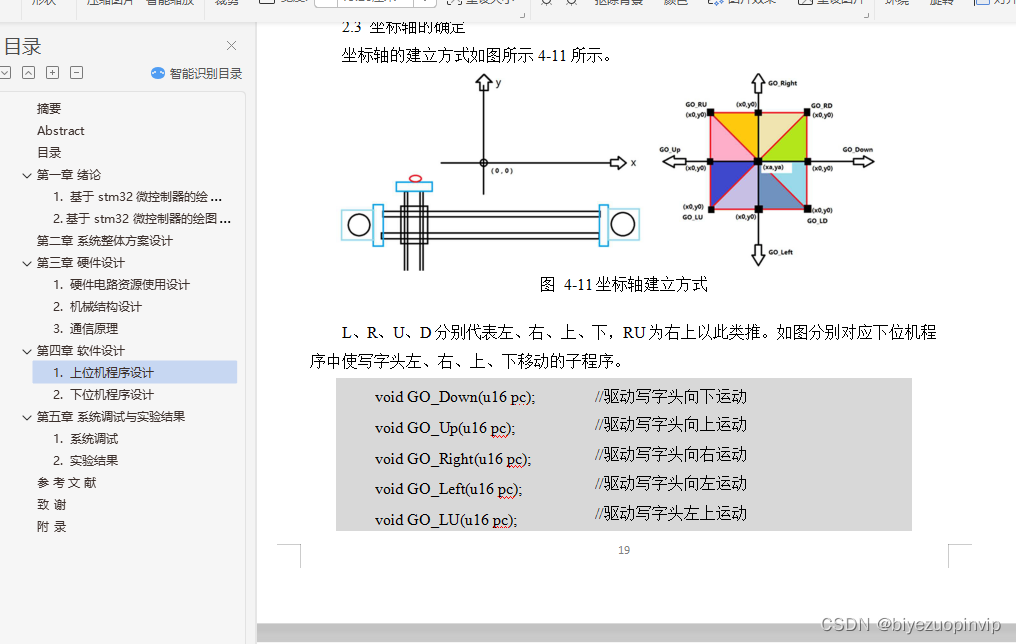
2.3 坐标轴的确定 19
第五章 系统调试与实验结果 21 -
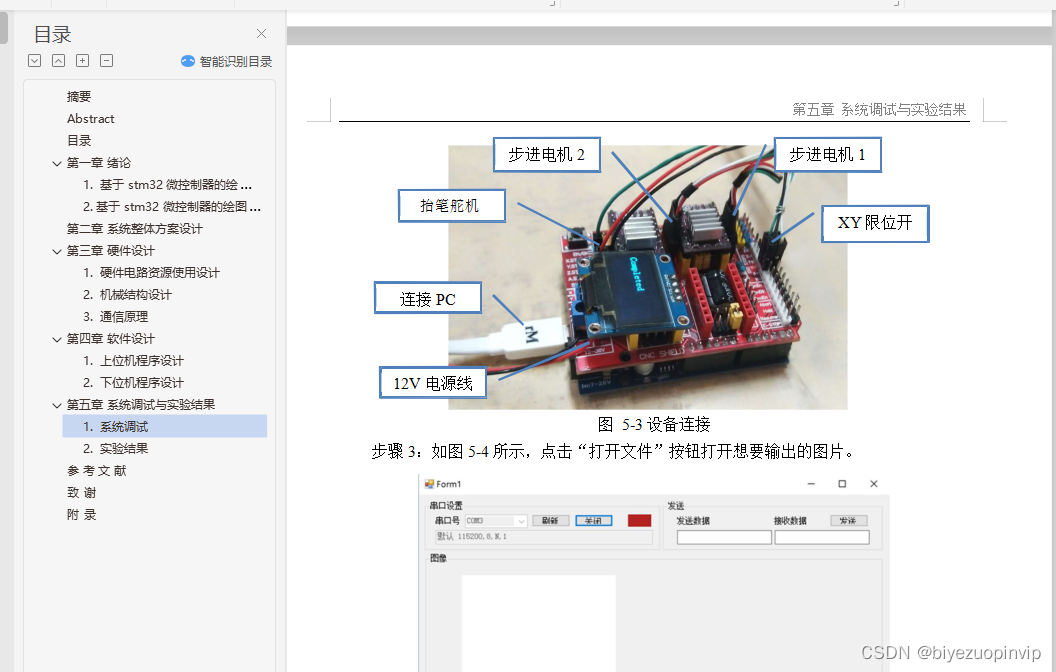
系统调试 21
-
实验结果 24
参 考 文 献 25
致 谢 26
附 录 27 -
通信原理
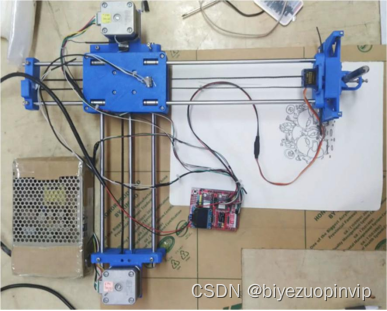
图 3-6 组装实物图
下位机采用 STM32 作为控制器。STM32 使用 CH340G 与计算机端串口连接,不仅提 供到 PC 的串行连接,还提供主控供电。STM32 通过 2 个计时器输出 3 路 PWM 方波,通 过 3 个 GPIO 引脚输出数字电平或数字式脉冲信号。开发环境为 MDK。
把足够功率和频率的脉冲波按照一定的顺序传到步进电机,才能驱动步进电机转动。
步进电机驱动模块接收控制 PWM 信号、方向(DIR)电平和使能(EN)信号,并按照步 进电机分配方式所要求的状态顺序来产生各相控信号,步进电机驱动模块输出信号数与电 机相数相同。DRV8825 每接收一个 PWM 脉冲信号,DRV8825 就输出一个由 DIR、EN、 STEP 综合决定的步进电机驱动信号。信号的产生特点在 MDK 中编写,使 STM32 产生控 制脉冲信号和方向电平。步进电机驱动模块采用 DRV8825。DRV8825 是一款带过流保护和 转换器的 DMOS 微步驱动器,在“STEP”中输入一个脉冲,即可驱动电动机产生微步。 只要控制 STEP 和 DIR 就可以了,STEP 是控制脉冲输入端,DIR 是方向电平输入端;3 个 模式选择端 MS1、MS2、MS3 全部接地即使用 32 细分,如果要求更高的精度,可通过选 其他模式,如选择 1/32 步迸模式,电机转一圈就要送 6400 个微步才能完成。控制脉冲发 生器和驱动器的结构示意图如图 2-7 所示。
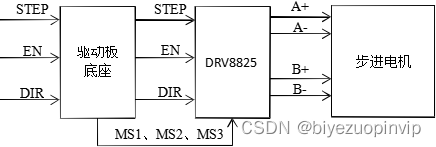
图 3-7 控制脉冲发生器和驱动器的结构
第四章 软件设计
绘图机器人运行中步进电机使用脉冲控制,STM32 发出与 42 步进电机前进距离的对 应控制信号和 PWM 信号。两点确定一条线段,由于串口速度较慢所以采用 div 参数增加细 分的方式减少串口数据传输量。给出两点 STM32 就会通过 Bresenham 直线算法,计算出其 间的各个点,再通过前后两点的位置关系完成绘图任务。
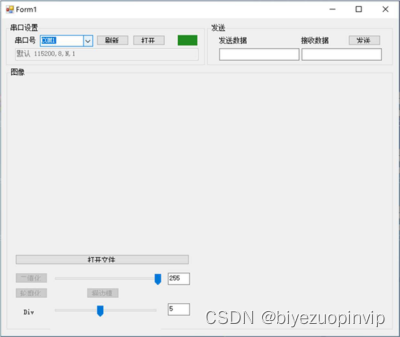
- 上位机程序设计
上位机程序采用 C#编写,计算机上位机将图片二值化再轮廓化,将轮廓化子图的细分 后的点的信息发送给下位机器,下位机将数据存储进缓冲区,再将缓冲区的数据绘制成图, 不断执行.直到最后一个子图执行完毕。本文转载自http://www.biyezuopin.vip/onews.asp?id=12566图片可以是 jpg、 bmp、png 格式等。用绘图软件 打开“限制图幅.bmp”将欲打印的字或者图编辑入图片中,保存。

图 4-1 蓝星上位机界面
#include "bsp.h"void SW_GPIO_Config(void) //限位开关GPIO初始化 校准用限位
{GPIO_InitTypeDef GPIO_InitStructure;RCC_APB2PeriphClockCmd(TOPSWITCHCLK|RCC_APB2Periph_AFIO,ENABLE );GPIO_InitStructure.GPIO_Mode=GPIO_Mode_IPU ;GPIO_InitStructure.GPIO_Pin=TOPSWITCHPIN;GPIO_InitStructure.GPIO_Speed = GPIO_Speed_50MHz ;GPIO_Init(TOPSWITCHPORT,&GPIO_InitStructure);RCC_APB2PeriphClockCmd(LEFTSWITCHCLK|RCC_APB2Periph_AFIO,ENABLE );GPIO_InitStructure.GPIO_Mode=GPIO_Mode_IPU ;GPIO_InitStructure.GPIO_Pin=LEFTSWITCHPIN;GPIO_InitStructure.GPIO_Speed = GPIO_Speed_50MHz ;GPIO_Init(LEFTSWITCHPORT,&GPIO_InitStructure);
{
// GPIO_EXTILineConfig(TOP_SWITCH_PORT_SOURCE, TOP_SWITCH_PIN_SOURCE);
// GPIO_EXTILineConfig(LEFT_SWITCH_PORT_SOURCE, LEFT_SWITCH_PIN_SOURCE);
//
// EXTI_InitTypeDef EXTI_InitStructure;
// EXTI_InitStructure.EXTI_Line = LEFT_SWITCH_INT_EXTI_LINE;
// EXTI_InitStructure.EXTI_Mode = EXTI_Mode_Interrupt;
// EXTI_InitStructure.EXTI_Trigger = EXTI_Trigger_Falling;
// EXTI_InitStructure.EXTI_LineCmd = ENABLE;
// EXTI_Init(&EXTI_InitStructure);
//
// EXTI_InitStructure.EXTI_Line = TOP_SWITCH_INT_EXTI_LINE;
// EXTI_InitStructure.EXTI_Mode = EXTI_Mode_Interrupt;
// EXTI_InitStructure.EXTI_Trigger = EXTI_Trigger_Falling;
// EXTI_InitStructure.EXTI_LineCmd = ENABLE;
// EXTI_Init(&EXTI_InitStructure);
//
// NVIC_InitTypeDef NVIC_InitStructure;
// NVIC_PriorityGroupConfig(NVIC_PriorityGroup_0);
//
// NVIC_InitStructure.NVIC_IRQChannel = TOP_SWITCH_INT_EXTI_IRQ; //TOPSW外部中断线
// NVIC_InitStructure.NVIC_IRQChannelSubPriority = 0;
// NVIC_InitStructure.NVIC_IRQChannelPreemptionPriority = 0;
// NVIC_InitStructure.NVIC_IRQChannelCmd = ENABLE;
// NVIC_Init(&NVIC_InitStructure);
//
// NVIC_InitStructure.NVIC_IRQChannel = LEFT_SWITCH_INT_EXTI_IRQ; //LEFTSW外部中断线
// NVIC_InitStructure.NVIC_IRQChannelSubPriority = 0;
// NVIC_InitStructure.NVIC_IRQChannelPreemptionPriority = 0;
// NVIC_InitStructure.NVIC_IRQChannelCmd = ENABLE;
// NVIC_Init(&NVIC_InitStructure);}
}void MOT_GPIO_Config(void)//MOT pwm、GPIO初始化函数
{//Tim2 --- ch1 A0GPIO_InitTypeDef TOP_TIMGPIO_InitStructure;RCC_APB2PeriphClockCmd (AFIOCLK ,ENABLE );RCC_APB1PeriphClockCmd (TOP_MotSCLK,ENABLE );TOP_TIMGPIO_InitStructure.GPIO_Mode=GPIO_Mode_AF_PP ;TOP_TIMGPIO_InitStructure .GPIO_Pin =TOP_MotSPIN;TOP_TIMGPIO_InitStructure .GPIO_Speed = GPIO_Speed_50MHz ;GPIO_Init(TOP_MotSPORT,&TOP_TIMGPIO_InitStructure);//TOP D--B6GPIO_InitTypeDef TOP_DGPIO_InitStructure;RCC_APB2PeriphClockCmd (TOP_MotDCLK ,ENABLE );TOP_DGPIO_InitStructure .GPIO_Mode =GPIO_Mode_Out_PP ;TOP_DGPIO_InitStructure.GPIO_Speed = GPIO_Speed_50MHz;TOP_DGPIO_InitStructure .GPIO_Pin =TOP_MotDPIN;GPIO_Init(TOP_MotDPORT,&TOP_DGPIO_InitStructure);//Tim2 --- ch2 A1GPIO_InitTypeDef BOT_TIMGPIO_InitStructure;RCC_APB2PeriphClockCmd (AFIOCLK ,ENABLE );RCC_APB1PeriphClockCmd (BOT_MotSCLK,ENABLE );BOT_TIMGPIO_InitStructure.GPIO_Mode=GPIO_Mode_AF_PP ;BOT_TIMGPIO_InitStructure .GPIO_Pin =BOT_MotSPIN;BOT_TIMGPIO_InitStructure .GPIO_Speed = GPIO_Speed_50MHz ;GPIO_Init(BOT_MotSPORT,&BOT_TIMGPIO_InitStructure);//BOT D--A8GPIO_InitTypeDef BOT_DGPIO_InitStructure;RCC_APB2PeriphClockCmd (BOT_MotDCLK ,ENABLE );BOT_DGPIO_InitStructure .GPIO_Mode =GPIO_Mode_Out_PP ;BOT_DGPIO_InitStructure.GPIO_Speed = GPIO_Speed_50MHz;BOT_DGPIO_InitStructure .GPIO_Pin =BOT_MotDPIN;GPIO_Init(BOT_MotDPORT,&BOT_DGPIO_InitStructure);GPIO_InitTypeDef EGPIO_InitStructure;RCC_APB2PeriphClockCmd (MotECLK ,ENABLE );EGPIO_InitStructure .GPIO_Mode =GPIO_Mode_Out_PP ;EGPIO_InitStructure.GPIO_Speed = GPIO_Speed_50MHz;EGPIO_InitStructure .GPIO_Pin =MotEPIN;GPIO_Init(MotEPORT,&EGPIO_InitStructure);MOT_DISEN;GPIO_InitTypeDef DJ_GPIO_InitStructure;RCC_APB2PeriphClockCmd (AFIOCLK ,ENABLE );RCC_APB1PeriphClockCmd (DJ_MotCLK,ENABLE );DJ_GPIO_InitStructure.GPIO_Mode=GPIO_Mode_AF_PP ;DJ_GPIO_InitStructure .GPIO_Pin =DJ_MotPIN;DJ_GPIO_InitStructure .GPIO_Speed = GPIO_Speed_50MHz ;GPIO_Init(DJ_MotPORT,&DJ_GPIO_InitStructure);}
void PWM_Config(u32 PWM1Freq)//Tim2 -PWM
{TIM_TimeBaseInitTypeDef TIM_TimeBaseStructure;TIM_OCInitTypeDef TIM_OCInitStructure;u16 tim_period;u16 tim_pulse;tim_period=(u16)(TIM2_COUNTER_CLK/PWM1Freq-1);tim_pulse =(tim_period+1)*0.5;//默认占空比为50%TIM_TimeBaseStructure.TIM_Prescaler =0;//预分频为1TIM_TimeBaseStructure.TIM_CounterMode = TIM_CounterMode_Up ;//向上计数TIM_TimeBaseStructure.TIM_Period = tim_period; //定时周期TIM_TimeBaseStructure.TIM_ClockDivision = TIM_CKD_DIV1;TIM_TimeBaseInit(TIM2 ,&TIM_TimeBaseStructure);TIM_OCInitStructure.TIM_OCMode=TIM_OCMode_PWM1;TIM_OCInitStructure.TIM_OutputState = TIM_OutputState_Enable;TIM_OCInitStructure.TIM_Pulse =tim_pulse;TIM_OCInitStructure.TIM_OCPolarity=TIM_OCPolarity_High;TIM_OC1Init(TIM2 ,&TIM_OCInitStructure);TIM_OC2Init(TIM2 ,&TIM_OCInitStructure);// TIM2->CCER&=~1 ;//通道1关闭
// TIM2->CCER&=~(1<<4) ;//通道2关闭TIM_OC1PolarityConfig (TIM2,TIM_OCPreload_Enable );TIM_OC2PolarityConfig (TIM2,TIM_OCPreload_Enable );TIM_ARRPreloadConfig (TIM2,ENABLE );TIM_Cmd (TIM2,ENABLE );TIM2->DIER |=(u32)1;//tim2中断使能
// TIM2->CR2 &=~(u32)7<<4;
}void DJ_PWM_Config(u32 PWM1Freq)//Tim4 -ch4
{TIM_TimeBaseInitTypeDef TIM_TimeBaseStructure;TIM_OCInitTypeDef TIM_OCInitStructure;u16 tim_period;u16 tim_pulse;tim_period=(u16)(TIM4_COUNTER_CLK/PWM1Freq-1);tim_pulse =(tim_period+1)*0.08;//默认占空比为8 x0.08TIM_TimeBaseStructure.TIM_Prescaler =1000;//预分频为1TIM_TimeBaseStructure.TIM_CounterMode = TIM_CounterMode_Up ;//向上计数TIM_TimeBaseStructure.TIM_Period = tim_period; //定时周期TIM_TimeBaseStructure.TIM_ClockDivision = TIM_CKD_DIV1;TIM_TimeBaseInit(TIM4,&TIM_TimeBaseStructure);TIM_OCInitStructure.TIM_OCMode=TIM_OCMode_PWM1;TIM_OCInitStructure.TIM_OutputState = TIM_OutputState_Enable;TIM_OCInitStructure.TIM_Pulse =tim_pulse;TIM_OCInitStructure.TIM_OCPolarity=TIM_OCPolarity_High;TIM_OC4Init(TIM4 ,&TIM_OCInitStructure);TIM_OC1PolarityConfig (TIM4,TIM_OCPreload_Enable );//TIM_OC4PolarityConfig (TIM4,TIM_OCPreload_Enable );TIM_ARRPreloadConfig (TIM4,ENABLE );TIM_Cmd (TIM4,ENABLE );TIM4->CCER|=(1<<12) ;//通道4打开
//TIM2->DIER |=(u32)1;//tim2中断使能
// TIM2->CR2 &=~(u32)7<<4;}
void DJ_PWM_Change(u8 t,u32 PWM1Freq)
{u16 tim_period;u16 tim_pulse; tim_period=(u16)(TIM4_COUNTER_CLK/PWM1Freq-1);tim_pulse =(tim_period+1)*t/1000;//默认占空比为8 x0.08DJ_TIM ->CCR4 = tim_pulse;
}void TIM_NVIC_Config(void)//TIM2中断初始化
{NVIC_InitTypeDef NVIC_InitStructure; NVIC_PriorityGroupConfig(NVIC_PriorityGroup_0); NVIC_InitStructure.NVIC_IRQChannel = TIM2_IRQn ; NVIC_InitStructure.NVIC_IRQChannelPreemptionPriority = 0; NVIC_InitStructure.NVIC_IRQChannelSubPriority = 0; NVIC_InitStructure.NVIC_IRQChannelCmd = ENABLE;NVIC_Init(&NVIC_InitStructure);
}void USART_NVIC_Config(void)
{NVIC_InitTypeDef NVIC_InitStructure;NVIC_PriorityGroupConfig(NVIC_PriorityGroup_0);NVIC_InitStructure.NVIC_IRQChannel = DEBUG_USART_IRQ;NVIC_InitStructure.NVIC_IRQChannelPreemptionPriority = 0;NVIC_InitStructure.NVIC_IRQChannelSubPriority = 1;NVIC_InitStructure.NVIC_IRQChannelCmd = ENABLE;NVIC_Init(&NVIC_InitStructure);
}
void USART_Config(void)
{GPIO_InitTypeDef GPIO_InitStructure;USART_InitTypeDef USART_InitStructure;DEBUG_USART_GPIO_APBxClkCmd(DEBUG_USART_GPIO_CLK, ENABLE);DEBUG_USART_APBxClkCmd(DEBUG_USART_CLK, ENABLE);GPIO_InitStructure.GPIO_Pin = DEBUG_USART_TX_GPIO_PIN;GPIO_InitStructure.GPIO_Mode = GPIO_Mode_AF_PP;GPIO_InitStructure.GPIO_Speed = GPIO_Speed_50MHz;GPIO_Init(DEBUG_USART_TX_GPIO_PORT, &GPIO_InitStructure);GPIO_InitStructure.GPIO_Pin = DEBUG_USART_RX_GPIO_PIN;GPIO_InitStructure.GPIO_Mode = GPIO_Mode_IN_FLOATING;//浮空模式GPIO_Init(DEBUG_USART_RX_GPIO_PORT, &GPIO_InitStructure);// 配置串口的工作参数USART_InitStructure.USART_BaudRate = DEBUG_USART_BAUDRATE; // 配置波特率USART_InitStructure.USART_WordLength = USART_WordLength_8b; // 配置 针数据字长USART_InitStructure.USART_StopBits = USART_StopBits_1; // 配置停止位USART_InitStructure.USART_Parity = USART_Parity_No ; // 配置校验位USART_InitStructure.USART_HardwareFlowControl = USART_HardwareFlowControl_None; // 配置硬件流控制USART_InitStructure.USART_Mode = USART_Mode_Rx | USART_Mode_Tx; // 配置工作模式,收发一起USART_Init(DEBUG_USARTx, &USART_InitStructure); // 完成串口的初始化配置USART_NVIC_Config(); // 串口中断优先级配置USART_ITConfig(DEBUG_USARTx, USART_IT_RXNE, ENABLE); // 使能串口接收中断USART_Cmd(DEBUG_USARTx, ENABLE); // 使能串口}
void Usart_SendByte( USART_TypeDef * pUSARTx, u8 ch)//发送一个字节
{USART_SendData(pUSARTx,ch); // 发送一个字节数据到USART while (USART_GetFlagStatus(pUSARTx, USART_FLAG_TXE) == RESET); // 等待发送数据寄存器为空
}void Usart_SendArray( USART_TypeDef * pUSARTx, u8 *array, u16 num) //发送8位数组
{uint8_t i;for(i=0; iUsart_SendByte(pUSARTx,array[i]); //发送一个字节数据到USART }while(USART_GetFlagStatus(pUSARTx,USART_FLAG_TC)==RESET); //等待发送完成
}/***************** 发送字符串 **********************/
void Usart_SendString( USART_TypeDef * pUSARTx, u8 *str)
{unsigned int k=0;do {Usart_SendByte( pUSARTx, *(str + k) );k++;} while(*(str + k)!='\0');while(USART_GetFlagStatus(pUSARTx,USART_FLAG_TC)==RESET); /* 等待发送完成 */
}/***************** 发送一个16位数 **********************/
void Usart_SendHalfWord( USART_TypeDef * pUSARTx, u16 ch)
{uint8_t temp_h, temp_l;/* 取出高八位 */temp_h = (ch&0XFF00)>>8;/* 取出低八位 */temp_l = ch&0XFF;/* 发送高八位 */USART_SendData(pUSARTx,temp_h); while (USART_GetFlagStatus(pUSARTx, USART_FLAG_TXE) == RESET);/* 发送低八位 */USART_SendData(pUSARTx,temp_l); while (USART_GetFlagStatus(pUSARTx, USART_FLAG_TXE) == RESET);
} 




上一篇:现在都这么狂吗?面试了一个工作4年的测试工程师,一问连自动化基础都不清楚,还反过来怼我....
下一篇:JADE: Adaptive Differential Evolution withOptional External Archive