
STM32G070RBT6基于Arduino串口的使用
创始人
2024-03-31 06:13:34
STM32G070RBT6基于Arduino串口的使用
📓STM32G070RBT6串口资源介绍
✨STM32G070RBT6总共有4个USART资源。
Serial1 for USART1
Serial2 for USART2
Serial3 for USART3
Serial4 for UART4
🔖默认情况下,只有一个Serialx实例映射到通用
Serial名。对于STM32G070RBT6而言,映射的管脚为:PA1和PA0。
- 📍在
C:\Users\Administrator\AppData\Local\Arduino15\packages\STMicroelectronics\hardware\stm32\2.3.0\variants\STM32G0xx\G070RBT\variant_generic.h中可以找到相关定义:
// Default pin used for generic 'Serial' instance
// Mandatory for Firmata
#ifndef PIN_SERIAL_RX#define PIN_SERIAL_RX PA1
#endif
#ifndef PIN_SERIAL_TX#define PIN_SERIAL_TX PA0
#endif
✅默认串口使用示例1
#define led1 PC2
#define led2 PC3#define button1 PC0
#define button2 PC1// the setup function runs once when you press reset or power the board
void setup() {Serial.begin(115200);//默认串口1的输出管脚:PA0 PA1。// initialize digital pin LED_BUILTIN as an output.pinMode(led1, OUTPUT);pinMode(led2, OUTPUT);digitalWrite(led1, LOW);digitalWrite(led2, HIGH);pinMode(button1, INPUT_PULLUP);pinMode(button2, INPUT_PULLUP);}// the loop function runs over and over again forever
void loop() {digitalToggleFast(PC_2); // turn the LED on (HIGH is the voltage level)digitalToggle(led2);delay(1000); // wait for a secondSerial.println("Perseverance51");digitalWriteFast(PC_2, !digitalReadFast(PC_2)) ; // turn the LED off by making the voltage LOWdigitalWrite(led2, !digitalRead(led2)) ;delay(1000); // wait for a secondSerial.println("Arduino STM32G070RBT6");
}
🌼串口1指定到管脚使用示例2
// RX TX
HardwareSerial Serial1(PA10, PA9);//将串口1的管脚指定到PA10,PA9引脚上// the setup function runs once when you press reset or power the board
void setup() {Serial1.begin(115200);// initialize digital pin LED_BUILTIN as an output.pinMode(led1, OUTPUT);pinMode(led2, OUTPUT);digitalWrite(led1, LOW);digitalWrite(led2, HIGH);pinMode(button1, INPUT_PULLUP);pinMode(button2, INPUT_PULLUP);}// the loop function runs over and over again forever
void loop() {digitalToggleFast(PC_2); // turn the LED on (HIGH is the voltage level)digitalToggle(led2);delay(1000); // wait for a secondSerial1.println("Perseverance51");digitalWriteFast(PC_2, !digitalReadFast(PC_2)) ; // turn the LED off by making the voltage LOWdigitalWrite(led2, !digitalRead(led2)) ;delay(1000); // wait for a secondSerial1.println("Arduino STM32G070RBT6");
}
🌻将串口1复用到PC4和PC5引脚上

🌷示例4
#define led1 PC2
#define led2 PC3#define button1 PC0
#define button2 PC1// RX TX
HardwareSerial Serial1(PC5, PC4);// the setup function runs once when you press reset or power the board
void setup() {
// HardwareSerial(PA10, PA9);Serial1.begin(115200);// initialize digital pin LED_BUILTIN as an output.pinMode(led1, OUTPUT);pinMode(led2, OUTPUT);digitalWrite(led1, LOW);digitalWrite(led2, HIGH);pinMode(button1, INPUT_PULLUP);pinMode(button2, INPUT_PULLUP);}// the loop function runs over and over again forever
void loop() {digitalToggleFast(PC_2); // turn the LED on (HIGH is the voltage level)digitalToggle(led2);delay(1000); // wait for a secondSerial1.println("Perseverance51");digitalWriteFast(PC_2, !digitalReadFast(PC_2)) ; // turn the LED off by making the voltage LOWdigitalWrite(led2, !digitalRead(led2)) ;delay(1000); // wait for a secondSerial1.println("Arduino STM32G070RBT6");
}
📝将串口1复用到PB7和PB6引脚上
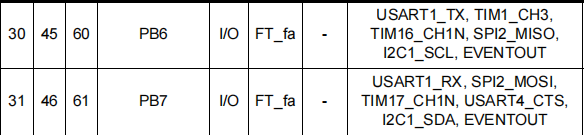
示例5
#define led1 PC2
#define led2 PC3#define button1 PC0
#define button2 PC1// RX TX
HardwareSerial Serial1(PB7, PB6);// the setup function runs once when you press reset or power the board
void setup() {Serial1.begin(115200);// initialize digital pin LED_BUILTIN as an output.pinMode(led1, OUTPUT);pinMode(led2, OUTPUT);digitalWrite(led1, LOW);digitalWrite(led2, HIGH);pinMode(button1, INPUT_PULLUP);pinMode(button2, INPUT_PULLUP);}// the loop function runs over and over again forever
void loop() {digitalToggleFast(PC_2); // turn the LED on (HIGH is the voltage level)digitalToggle(led2);delay(1000); // wait for a secondSerial1.println("Perseverance51");digitalWriteFast(PC_2, !digitalReadFast(PC_2)) ; // turn the LED off by making the voltage LOWdigitalWrite(led2, !digitalRead(led2)) ;delay(1000); // wait for a secondSerial1.println("Arduino STM32G070RBT6");
}
🛠除了上面定义方式外还有另一种指定串口的方法
void setRx(uint32_t rx)
void setTx(uint32_t tx)
void setRx(PinName rx)
void setTx(PinName tx)
🚩注意点:重载函数名相同,形参注意区分。
- 🌿
variant_generic.h头文件声明了数字引脚
/*----------------------------------------------------------------------------* STM32 pins number*----------------------------------------------------------------------------*/
#define PA0 PIN_A0
#define PA1 PIN_A1
#define PA2 PIN_A2
#define PA3 PIN_A3
#define PA4 PIN_A4
#define PA5 PIN_A5
#define PA6 PIN_A6
#define PA7 PIN_A7
#define PA8 8
#define PA9 9
#define PA10 10
#define PA11 11
#define PA12 12
#define PA13 13
#define PA14 14
#define PA15 15
#define PB0 PIN_A8
#define PB1 PIN_A9
#define PB2 PIN_A10
#define PB3 19
#define PB4 20
#define PB5 21
#define PB6 22
#define PB7 23
#define PB8 24
#define PB9 25
#define PB10 PIN_A11
#define PB11 PIN_A12
#define PB12 PIN_A13
#define PB13 29
#define PB14 30
#define PB15 31
#define PC0 32
#define PC1 33
#define PC2 34
#define PC3 35
#define PC4 PIN_A14
#define PC5 PIN_A15
#define PC6 38
#define PC7 39
#define PC8 40
#define PC9 41
#define PC10 42
#define PC11 43
#define PC12 44
#define PC13 45
#define PC14 46
#define PC15 47
#define PD0 48
#define PD1 49
#define PD2 50
#define PD3 51
#define PD4 52
#define PD5 53
#define PD6 54
#define PD8 55
#define PD9 56
#define PF0 57
#define PF1 58
#define PA9_R 59
#define PA10_R 60// Alternate pins number
#define PA6_ALT1 (PA6 | ALT1)
#define PA7_ALT1 (PA7 | ALT1)
#define PA7_ALT2 (PA7 | ALT2)
#define PA7_ALT3 (PA7 | ALT3)
#define PA15_ALT1 (PA15 | ALT1)
#define PB0_ALT1 (PB0 | ALT1)
#define PB1_ALT1 (PB1 | ALT1)
#define PB1_ALT2 (PB1 | ALT2)
#define PB6_ALT1 (PB6 | ALT1)
#define PB13_ALT1 (PB13 | ALT1)
#define PB14_ALT1 (PB14 | ALT1)
#define PB15_ALT1 (PB15 | ALT1)
#define PB15_ALT2 (PB15 | ALT2)
#define PC4_ALT1 (PC4 | ALT1)
#define PC5_ALT1 (PC5 | ALT1)
#define PC8_ALT1 (PC8 | ALT1)
#define PC9_ALT1 (PC9 | ALT1)
#define PC10_ALT1 (PC10 | ALT1)
#define PC11_ALT1 (PC11 | ALT1)#define NUM_DIGITAL_PINS 61
#define NUM_REMAP_PINS 2
- ⚡
PinNames.h头文件定义了形参PinName枚举类型
typedef enum {// Not connectedNC = 0xFFFFFFFF,// Pin name definitionPA_0 = (PortA << 4) + 0x00,PA_1 = (PortA << 4) + 0x01,PA_2 = (PortA << 4) + 0x02,PA_3 = (PortA << 4) + 0x03,PA_4 = (PortA << 4) + 0x04,PA_5 = (PortA << 4) + 0x05,PA_6 = (PortA << 4) + 0x06,PA_7 = (PortA << 4) + 0x07,PA_8 = (PortA << 4) + 0x08,PA_9 = (PortA << 4) + 0x09,PA_10 = (PortA << 4) + 0x0A,PA_11 = (PortA << 4) + 0x0B,PA_12 = (PortA << 4) + 0x0C,PA_13 = (PortA << 4) + 0x0D,PA_14 = (PortA << 4) + 0x0E,PA_15 = (PortA << 4) + 0x0F,PB_0 = (PortB << 4) + 0x00,PB_1 = (PortB << 4) + 0x01,PB_2 = (PortB << 4) + 0x02,PB_3 = (PortB << 4) + 0x03,PB_4 = (PortB << 4) + 0x04,PB_5 = (PortB << 4) + 0x05,PB_6 = (PortB << 4) + 0x06,PB_7 = (PortB << 4) + 0x07,PB_8 = (PortB << 4) + 0x08,PB_9 = (PortB << 4) + 0x09,PB_10 = (PortB << 4) + 0x0A,PB_11 = (PortB << 4) + 0x0B,PB_12 = (PortB << 4) + 0x0C,PB_13 = (PortB << 4) + 0x0D,PB_14 = (PortB << 4) + 0x0E,PB_15 = (PortB << 4) + 0x0F,
#if defined GPIOC_BASEPC_0 = (PortC << 4) + 0x00,PC_1 = (PortC << 4) + 0x01,PC_2 = (PortC << 4) + 0x02,PC_3 = (PortC << 4) + 0x03,PC_4 = (PortC << 4) + 0x04,PC_5 = (PortC << 4) + 0x05,PC_6 = (PortC << 4) + 0x06,PC_7 = (PortC << 4) + 0x07,PC_8 = (PortC << 4) + 0x08,PC_9 = (PortC << 4) + 0x09,PC_10 = (PortC << 4) + 0x0A,PC_11 = (PortC << 4) + 0x0B,PC_12 = (PortC << 4) + 0x0C,PC_13 = (PortC << 4) + 0x0D,PC_14 = (PortC << 4) + 0x0E,PC_15 = (PortC << 4) + 0x0F,
#endif
#if defined GPIOD_BASEPD_0 = (PortD << 4) + 0x00,PD_1 = (PortD << 4) + 0x01,PD_2 = (PortD << 4) + 0x02,PD_3 = (PortD << 4) + 0x03,PD_4 = (PortD << 4) + 0x04,PD_5 = (PortD << 4) + 0x05,PD_6 = (PortD << 4) + 0x06,PD_7 = (PortD << 4) + 0x07,PD_8 = (PortD << 4) + 0x08,PD_9 = (PortD << 4) + 0x09,PD_10 = (PortD << 4) + 0x0A,PD_11 = (PortD << 4) + 0x0B,PD_12 = (PortD << 4) + 0x0C,PD_13 = (PortD << 4) + 0x0D,PD_14 = (PortD << 4) + 0x0E,PD_15 = (PortD << 4) + 0x0F,
#endif
#if defined GPIOE_BASEPE_0 = (PortE << 4) + 0x00,PE_1 = (PortE << 4) + 0x01,PE_2 = (PortE << 4) + 0x02,PE_3 = (PortE << 4) + 0x03,PE_4 = (PortE << 4) + 0x04,PE_5 = (PortE << 4) + 0x05,PE_6 = (PortE << 4) + 0x06,PE_7 = (PortE << 4) + 0x07,PE_8 = (PortE << 4) + 0x08,PE_9 = (PortE << 4) + 0x09,PE_10 = (PortE << 4) + 0x0A,PE_11 = (PortE << 4) + 0x0B,PE_12 = (PortE << 4) + 0x0C,PE_13 = (PortE << 4) + 0x0D,PE_14 = (PortE << 4) + 0x0E,PE_15 = (PortE << 4) + 0x0F,
#endif
#if defined GPIOF_BASEPF_0 = (PortF << 4) + 0x00,PF_1 = (PortF << 4) + 0x01,PF_2 = (PortF << 4) + 0x02,PF_3 = (PortF << 4) + 0x03,PF_4 = (PortF << 4) + 0x04,PF_5 = (PortF << 4) + 0x05,PF_6 = (PortF << 4) + 0x06,PF_7 = (PortF << 4) + 0x07,PF_8 = (PortF << 4) + 0x08,PF_9 = (PortF << 4) + 0x09,PF_10 = (PortF << 4) + 0x0A,PF_11 = (PortF << 4) + 0x0B,PF_12 = (PortF << 4) + 0x0C,PF_13 = (PortF << 4) + 0x0D,PF_14 = (PortF << 4) + 0x0E,PF_15 = (PortF << 4) + 0x0F,
#endif
#if defined GPIOG_BASEPG_0 = (PortG << 4) + 0x00,PG_1 = (PortG << 4) + 0x01,PG_2 = (PortG << 4) + 0x02,PG_3 = (PortG << 4) + 0x03,PG_4 = (PortG << 4) + 0x04,PG_5 = (PortG << 4) + 0x05,PG_6 = (PortG << 4) + 0x06,PG_7 = (PortG << 4) + 0x07,PG_8 = (PortG << 4) + 0x08,PG_9 = (PortG << 4) + 0x09,PG_10 = (PortG << 4) + 0x0A,PG_11 = (PortG << 4) + 0x0B,PG_12 = (PortG << 4) + 0x0C,PG_13 = (PortG << 4) + 0x0D,PG_14 = (PortG << 4) + 0x0E,PG_15 = (PortG << 4) + 0x0F,
#endif
#if defined GPIOH_BASEPH_0 = (PortH << 4) + 0x00,PH_1 = (PortH << 4) + 0x01,PH_2 = (PortH << 4) + 0x02,PH_3 = (PortH << 4) + 0x03,PH_4 = (PortH << 4) + 0x04,PH_5 = (PortH << 4) + 0x05,PH_6 = (PortH << 4) + 0x06,PH_7 = (PortH << 4) + 0x07,PH_8 = (PortH << 4) + 0x08,PH_9 = (PortH << 4) + 0x09,PH_10 = (PortH << 4) + 0x0A,PH_11 = (PortH << 4) + 0x0B,PH_12 = (PortH << 4) + 0x0C,PH_13 = (PortH << 4) + 0x0D,PH_14 = (PortH << 4) + 0x0E,PH_15 = (PortH << 4) + 0x0F,
#endif
#if defined GPIOI_BASEPI_0 = (PortI << 4) + 0x00,PI_1 = (PortI << 4) + 0x01,PI_2 = (PortI << 4) + 0x02,PI_3 = (PortI << 4) + 0x03,PI_4 = (PortI << 4) + 0x04,PI_5 = (PortI << 4) + 0x05,PI_6 = (PortI << 4) + 0x06,PI_7 = (PortI << 4) + 0x07,PI_8 = (PortI << 4) + 0x08,PI_9 = (PortI << 4) + 0x09,PI_10 = (PortI << 4) + 0x0A,PI_11 = (PortI << 4) + 0x0B,PI_12 = (PortI << 4) + 0x0C,PI_13 = (PortI << 4) + 0x0D,PI_14 = (PortI << 4) + 0x0E,PI_15 = (PortI << 4) + 0x0F,
#endif
#if defined GPIOJ_BASEPJ_0 = (PortJ << 4) + 0x00,PJ_1 = (PortJ << 4) + 0x01,PJ_2 = (PortJ << 4) + 0x02,PJ_3 = (PortJ << 4) + 0x03,PJ_4 = (PortJ << 4) + 0x04,PJ_5 = (PortJ << 4) + 0x05,PJ_6 = (PortJ << 4) + 0x06,PJ_7 = (PortJ << 4) + 0x07,PJ_8 = (PortJ << 4) + 0x08,PJ_9 = (PortJ << 4) + 0x09,PJ_10 = (PortJ << 4) + 0x0A,PJ_11 = (PortJ << 4) + 0x0B,PJ_12 = (PortJ << 4) + 0x0C,PJ_13 = (PortJ << 4) + 0x0D,PJ_14 = (PortJ << 4) + 0x0E,PJ_15 = (PortJ << 4) + 0x0F,
#endif
#if defined GPIOK_BASEPK_0 = (PortK << 4) + 0x00,PK_1 = (PortK << 4) + 0x01,PK_2 = (PortK << 4) + 0x02,PK_3 = (PortK << 4) + 0x03,PK_4 = (PortK << 4) + 0x04,PK_5 = (PortK << 4) + 0x05,PK_6 = (PortK << 4) + 0x06,PK_7 = (PortK << 4) + 0x07,PK_8 = (PortK << 4) + 0x08,PK_9 = (PortK << 4) + 0x09,PK_10 = (PortK << 4) + 0x0A,PK_11 = (PortK << 4) + 0x0B,PK_12 = (PortK << 4) + 0x0C,PK_13 = (PortK << 4) + 0x0D,PK_14 = (PortK << 4) + 0x0E,PK_15 = (PortK << 4) + 0x0F,
#endif
#if defined GPIOZ_BASEPZ_0 = (PortZ << 4) + 0x00,PZ_1 = (PortZ << 4) + 0x01,PZ_2 = (PortZ << 4) + 0x02,PZ_3 = (PortZ << 4) + 0x03,PZ_4 = (PortZ << 4) + 0x04,PZ_5 = (PortZ << 4) + 0x05,PZ_6 = (PortZ << 4) + 0x06,PZ_7 = (PortZ << 4) + 0x07,PZ_8 = (PortZ << 4) + 0x08,PZ_9 = (PortZ << 4) + 0x09,PZ_10 = (PortZ << 4) + 0x0A,PZ_11 = (PortZ << 4) + 0x0B,PZ_12 = (PortZ << 4) + 0x0C,PZ_13 = (PortZ << 4) + 0x0D,PZ_14 = (PortZ << 4) + 0x0E,PZ_15 = (PortZ << 4) + 0x0F,
#endif✅示例6
#define led1 PC2
#define led2 PC3#define button1 PC0
#define button2 PC1// the setup function runs once when you press reset or power the board
void setup() {Serial.setRx(PA10); // using pin name PY_nSerial.setTx(PA9); // using pin number PYnSerial.begin(115200);// initialize digital pin LED_BUILTIN as an output.pinMode(led1, OUTPUT);pinMode(led2, OUTPUT);digitalWrite(led1, LOW);digitalWrite(led2, HIGH);pinMode(button1, INPUT_PULLUP);pinMode(button2, INPUT_PULLUP);}// the loop function runs over and over again forever
void loop() {digitalToggleFast(PC_2); // turn the LED on (HIGH is the voltage level)digitalToggle(led2);delay(1000); // wait for a secondSerial.println("Perseverance51");digitalWriteFast(PC_2, !digitalReadFast(PC_2)) ; // turn the LED off by making the voltage LOWdigitalWrite(led2, !digitalRead(led2)) ;delay(1000); // wait for a secondSerial.println("Arduino STM32G070RBT6");
}
📚半双工模式
HardwareSerial(uint32_t _rxtx):U(S)ART用于半双工的Tx引脚编号(PYn)HardwareSerial(PinName _rxtx):U(S)ART用于半双工的Tx引脚编号(PYn)- 如果Rx == Tx则采用半双工模式::
HardwareSerial(uint32_t _rx, uint32_t _tx): U(S)ART用于半双工的Tx引脚编号(PYn)
HardwareSerial(PinName _rx, PinName tx): U(S)ART用于半双工的tx引脚名称(PY_n)
HardwareSerial(void *peripheral, HalfDuplexMode_t halfDuplex = HALF_DUPLEX_DISABLED):如果HALF_DUPLEX_ENABLED,在用于半双工的PeripheralPins.c中获取所请求外设的第一个Tx引脚.
- 添加
enableHalfDuplexRx()使能Rx模式下的Serial。可以使用read()操作,但将避免执行读操作。在使用available()之前使用. void setHalfDuplex():当实例未以半双工模式实例化时,启用实例的半双工模式。在这种情况下,必须在begin()之前调用。
📗示例7
Serial4发送字节给Serial3,比较值,然后Serial3重新发送给Serial4并比较。需要连接PA0和PB10。
HardwareSerial Serial3(PA0);
HardwareSerial Serial4(PB10);//HardwareSerial Serial3(PA_0);
//HardwareSerial Serial4(PB_10);//HardwareSerial Serial3(UART4, HALF_DUPLEX_ENABLED);
//HardwareSerial Serial4(USART3, HALF_DUPLEX_ENABLED);//HardwareSerial Serial3(PA0, PA0);
//HardwareSerial Serial4(PB10, PB10);//HardwareSerial Serial3(PA_0, PA_0);
//HardwareSerial Serial4(PB_10, PB_10);//HardwareSerial Serial3(NC, PA_0);
//HardwareSerial Serial4(NC, PB_10);//HardwareSerial Serial3(NUM_DIGITAL_PINS, PA0);
//HardwareSerial Serial4(NUM_DIGITAL_PINS, PB10);static uint32_t nbTestOK = 0;
static uint32_t nbTestKO = 0;
void test_uart(int val)
{int recval = -1;uint32_t error = 0;Serial4.write(val);delay(10);while (Serial3.available()) {recval = Serial3.read();}/* Enable Serial4 to RX*/Serial4.enableHalfDuplexRx();if (val == recval) {Serial3.write(val);delay(10);while (Serial4.available()) {recval = Serial4.read();}/* Enable Serial3 to RX*/Serial3.enableHalfDuplexRx();if (val == recval) {nbTestOK++;Serial.print("Exchange: 0x");Serial.println(recval, HEX);} else {error = 2;}}else {error = 1;}if (error) {Serial.print("Send: 0x");Serial.print(val, HEX);Serial.print("\tReceived: 0x");Serial.print(recval, HEX);Serial.print(" --> KO <--");Serial.println(error);nbTestKO++;}
}void setup() {Serial.begin(115200);Serial4.begin(9600);Serial3.begin(9600);
}void loop() {for (uint32_t i = 0; i <= (0xFF); i++) {test_uart(i);}Serial.println("Serial Half-Duplex test done.\nResults:");Serial.print("OK: ");Serial.println(nbTestOK);Serial.print("KO: ");Serial.println(nbTestKO);while (1);
}
- 相关内容参考:
https://github.com/stm32duino/wiki/wiki/API
相关内容
热门资讯
埃菲尔铁塔在哪 中国仿建埃菲尔...
2019年4月26日,广西南宁市,街头惊现一座巨型山寨版埃菲尔铁塔,高约20米,白色塔身,造型逼真,...
苗族的传统节日 贵州苗族节日有...
【岜沙苗族芦笙节】岜沙,苗语叫“分送”,距从江县城7.5公里,是世界上最崇拜树木并以树为神的枪手部落...
北京的名胜古迹 北京最著名的景...
北京从元代开始,逐渐走上帝国首都的道路,先是成为大辽朝五大首都之一的南京城,随着金灭辽,金代从海陵王...
世界上最漂亮的人 世界上最漂亮...
此前在某网上,选出了全球265万颜值姣好的女性。从这些数量庞大的女性群体中,人们投票选出了心目中最美...
长白山自助游攻略 吉林长白山游...
昨天介绍了西坡的景点详细请看链接:一个人的旅行,据说能看到长白山天池全凭运气,您的运气如何?今日介绍...
应用未安装解决办法 平板应用未...
---IT小技术,每天Get一个小技能!一、前言描述苹果IPad2居然不能安装怎么办?与此IPad不...
脚上的穴位图 脚面经络图对应的...
人体穴位作用图解大全更清晰直观的标注了各个人体穴位的作用,包括头部穴位图、胸部穴位图、背部穴位图、胳...
猫咪吃了塑料袋怎么办 猫咪误食...
你知道吗?塑料袋放久了会长猫哦!要说猫咪对塑料袋的喜爱程度完完全全可以媲美纸箱家里只要一有塑料袋的响...
demo什么意思 demo版本...
618快到了,各位的小金库大概也在准备开闸放水了吧。没有小金库的,也该向老婆撒娇卖萌服个软了,一切只...
长白山自助游攻略 吉林长白山游...
昨天介绍了西坡的景点详细请看链接:一个人的旅行,据说能看到长白山天池全凭运气,您的运气如何?今日介绍...
埃菲尔铁塔在哪 中国仿建埃菲尔...
2019年4月26日,广西南宁市,街头惊现一座巨型山寨版埃菲尔铁塔,高约20米,白色塔身,造型逼真,...
应用未安装解决办法 平板应用未...
---IT小技术,每天Get一个小技能!一、前言描述苹果IPad2居然不能安装怎么办?与此IPad不...
苗族的传统节日 贵州苗族节日有...
【岜沙苗族芦笙节】岜沙,苗语叫“分送”,距从江县城7.5公里,是世界上最崇拜树木并以树为神的枪手部落...
脚上的穴位图 脚面经络图对应的...
人体穴位作用图解大全更清晰直观的标注了各个人体穴位的作用,包括头部穴位图、胸部穴位图、背部穴位图、胳...
demo什么意思 demo版本...
618快到了,各位的小金库大概也在准备开闸放水了吧。没有小金库的,也该向老婆撒娇卖萌服个软了,一切只...
埃菲尔铁塔在哪 中国仿建埃菲尔...
2019年4月26日,广西南宁市,街头惊现一座巨型山寨版埃菲尔铁塔,高约20米,白色塔身,造型逼真,...
苗族的传统节日 贵州苗族节日有...
【岜沙苗族芦笙节】岜沙,苗语叫“分送”,距从江县城7.5公里,是世界上最崇拜树木并以树为神的枪手部落...
北京的名胜古迹 北京最著名的景...
北京从元代开始,逐渐走上帝国首都的道路,先是成为大辽朝五大首都之一的南京城,随着金灭辽,金代从海陵王...