
【国产GD32芯片解析中科微北斗+GPS模块经纬度数据详细教程-附完整代码工程】
创始人
2024-05-14 02:45:40
国产GD32芯片解析中科微北斗+GPS模块经纬度数据详细教程-附完整代码工程
- 简介
- 准备工作
- PC端需要用到的工具
- 代码下载地址
- GD32F103C8T6最小系统板
- 代码实现
- GD32串口引脚定义如下:
- 串口的初始化
- 串口0初始化代码:
- 串口1初始化代码
- 串口的输入
- 串口0的输入代码如下:
- 串口1的输入代码如下:
- 串口打印
- 串口0的串口打印输出代码如下:
- 串口1的串口打印输出代码如下:
- GPS模块的数据解析
- 解析代码
- 主函数
- 完整的工程代码下载地址:
- 北斗+GPS定位模块的验证
- 参考
简介
北斗+GPS定位模块测试板的测试工作已完成,计划春节后开售,本文介绍GD32作为主控芯片对北斗+GPS定位模块的经纬度数据的解析方法。
准备工作
PC端需要用到的工具
- XCOM串口调试助手;
- GPS经纬度地图定位工具。
下载地址:
https://pan.baidu.com/s/1scQYIS97CqzUzH5XQ3CI6A?pwd=5u0w
代码下载地址
完整的工程代码下载地址:
https://download.csdn.net/download/YANGJIERUN/87381512
GD32F103C8T6最小系统板
使用了gd32f103c8t6最小系统开发板,某宝上搜素“Makerbase高博士GD32开发板”即可找到,只需要30多块钱,如下图。

代码实现
GD32串口引脚定义如下:
GD32F103C8T6串口引脚说明:
| 串口 | 发送管脚(TX) | 接收管脚(RX) |
|---|---|---|
| USART0 | PA9 | PA10 |
| USART1 | PA2 | PA3 |
| USART2 | PB10 | PB11 |
本例程使用USART0下载程序、Debug打印数据使用,另外使用USART1读取GPS数据。
串口的初始化
USART0、USART1的初始化步骤一致,只是函数参数上USART0改为了USART1而已。
串口0初始化代码:
// 串口 0 初始化
void USART0_init(uint32_t bound)
{/* enable USART clock */rcu_periph_clock_enable(RCU_USART0);/* enable GPIO clock */rcu_periph_clock_enable(RCU_GPIOA);/* connect port to USARTx_Tx */gpio_init(GPIOA, GPIO_MODE_AF_PP, GPIO_OSPEED_50MHZ, GPIO_PIN_9);/* connect port to USARTx_Rx */gpio_init(GPIOA, GPIO_MODE_IN_FLOATING, GPIO_OSPEED_50MHZ, GPIO_PIN_10);/* USART configure */usart_deinit(USART0);usart_baudrate_set(USART0, bound);usart_word_length_set(USART0, USART_WL_8BIT);usart_stop_bit_set(USART0, USART_STB_1BIT);usart_parity_config(USART0, USART_PM_NONE);usart_hardware_flow_rts_config(USART0, USART_RTS_DISABLE);usart_hardware_flow_cts_config(USART0, USART_CTS_DISABLE);usart_receive_config(USART0, USART_RECEIVE_ENABLE);usart_transmit_config(USART0, USART_TRANSMIT_ENABLE);usart_enable(USART0);
}串口1初始化代码
// 串口 1 初始化
void USART1_init(uint32_t bound)
{/* enable USART clock */rcu_periph_clock_enable(RCU_USART1);/* enable GPIO clock */rcu_periph_clock_enable(RCU_GPIOA);/* connect port to USARTx_Tx */gpio_init(GPIOA, GPIO_MODE_AF_PP, GPIO_OSPEED_50MHZ, GPIO_PIN_2);/* connect port to USARTx_Rx */gpio_init(GPIOA, GPIO_MODE_IN_FLOATING, GPIO_OSPEED_50MHZ, GPIO_PIN_3);/* USART configure */usart_deinit(USART1);usart_baudrate_set(USART1, bound);usart_word_length_set(USART1, USART_WL_8BIT);usart_stop_bit_set(USART1, USART_STB_1BIT);usart_parity_config(USART1, USART_PM_NONE);usart_hardware_flow_rts_config(USART1, USART_RTS_DISABLE);usart_hardware_flow_cts_config(USART1, USART_CTS_DISABLE);usart_receive_config(USART1, USART_RECEIVE_ENABLE);usart_transmit_config(USART1, USART_TRANSMIT_ENABLE);usart_enable(USART1);
}
串口的输入
串口输入本教程使用最简单的轮询输入。网上有教程是通过重写scanf实现串口输入的,但是重写scanf的实际使用很不好。数据一多就出错,而且只能被一个串口使用,本人不推荐大家使用。个人觉得还是C语言库里面的getchar()用的舒服。
串口0的输入代码如下:
//串口0的专用 getchar 函数
char USART0_getchar(void)
{/* 等待串口输入数据 */while (usart_flag_get(USART0, USART_FLAG_RBNE) == RESET);return (char)usart_data_receive(USART0);
}
串口1的输入代码如下:
//串口1的专用 getchar 函数
char USART1_getchar(void)
{/* 等待串口输入数据 */while (usart_flag_get(USART1, USART_FLAG_RBNE) == RESET);return (char)usart_data_receive(USART1);
}
串口打印
串口0的串口打印输出代码如下:
//串口0的专用 putchar 函数
void USART0_putchar(char ch)
{usart_data_transmit(USART0, (uint8_t)ch);while(RESET == usart_flag_get(USART0, USART_FLAG_TBE));
}//串口0的专用 puts 函数
void USART0_puts(char* fmt)
{uint16_t i = 0;while(fmt[i] != '\0'){USART0_putchar(fmt[i]);i++;}
}
串口1的串口打印输出代码如下:
//串口1的专用 putchar 函数
void USART1_putchar(char ch)
{usart_data_transmit(USART1, (uint8_t)ch);while(RESET == usart_flag_get(USART1, USART_FLAG_TBE));
}//串口1的专用 puts 函数
void USART1_puts(char* fmt)
{uint16_t i = 0;while(fmt[i] != '\0'){USART1_putchar(fmt[i]);i++;}
}
GPS模块的数据解析
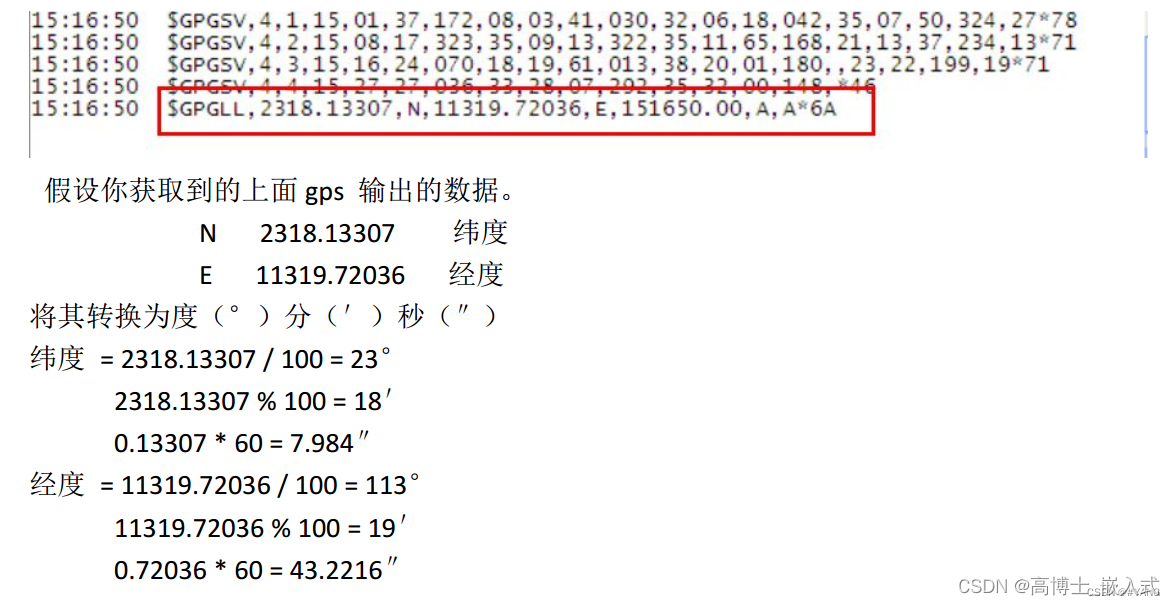
解析GPS的经纬度就是对串口上来的数据进行字符串匹配。中科微的GPS模组手册里面有其他数据解析的说明,这里只解析经纬度,其他数据的解析也是大同小异。经纬度的计算方法如下图:
解析代码
#include "DRG_GPS_Mode.h"#define BUFF_SIZE 200typedef struct SaveData
{char N_S[N_S_Length]; //N/Schar E_W[E_W_Length]; //E/W
} _SaveData;_SaveData Save_Data;// 解析 GPS 数据
void parseGpsBuffer(void)
{uint8_t ch,Rxbuffer[BUFF_SIZE];uint16_t index,i;while(1){ch = USART1_getchar();if(ch == '$'){index = 0;while(ch != ','){ch = USART1_getchar();Rxbuffer[index] = ch;index++;}if(!strcmp("GNGLL,",(const char*)Rxbuffer)){for(i = 0;i < 10;i++)Save_Data.N_S[i] = USART1_getchar();ch = USART1_getchar();ch = USART1_getchar();ch = USART1_getchar();for(i = 0;i < 10;i++)Save_Data.E_W[i] = USART1_getchar();break;}}}/*USART0_puts("Save_Data.N_S = ");USART0_puts(Save_Data.N_S);USART0_puts("\r\n");USART0_puts("Save_Data.E_W = ");USART0_puts(Save_Data.E_W);USART0_puts("\r\n");*/
}// 获取 GPS 纬度数据 - 字符串形式
char* Get_Gps_N_S_str(void)
{return Save_Data.N_S;
}// 获取 GPS 经度数据 - 字符串形式
char* Get_Gps_E_W_str(void)
{return Save_Data.E_W;
}
主函数
#include "DRG_GPS_Mode.h"int main(void)
{USART0_init(115200U);USART1_init(9600U);USART0_puts("USART0 begin...\r\n");USART1_puts("USART1 begin...\r\n");while(1){parseGpsBuffer(); // 解析串口 1 上 GPS 模块的数据USART0_puts("N_S = ");USART0_puts(Get_Gps_N_S_str()); // 打印维度字符串数据USART0_puts("\r\n");USART0_puts("E_W = ");USART0_puts(Get_Gps_E_W_str()); // 打印经度字符串数据USART0_puts("\r\n");}
}完整的工程代码下载地址:
https://download.csdn.net/download/YANGJIERUN/87381512
北斗+GPS定位模块的验证
串口助手读取到的数据:
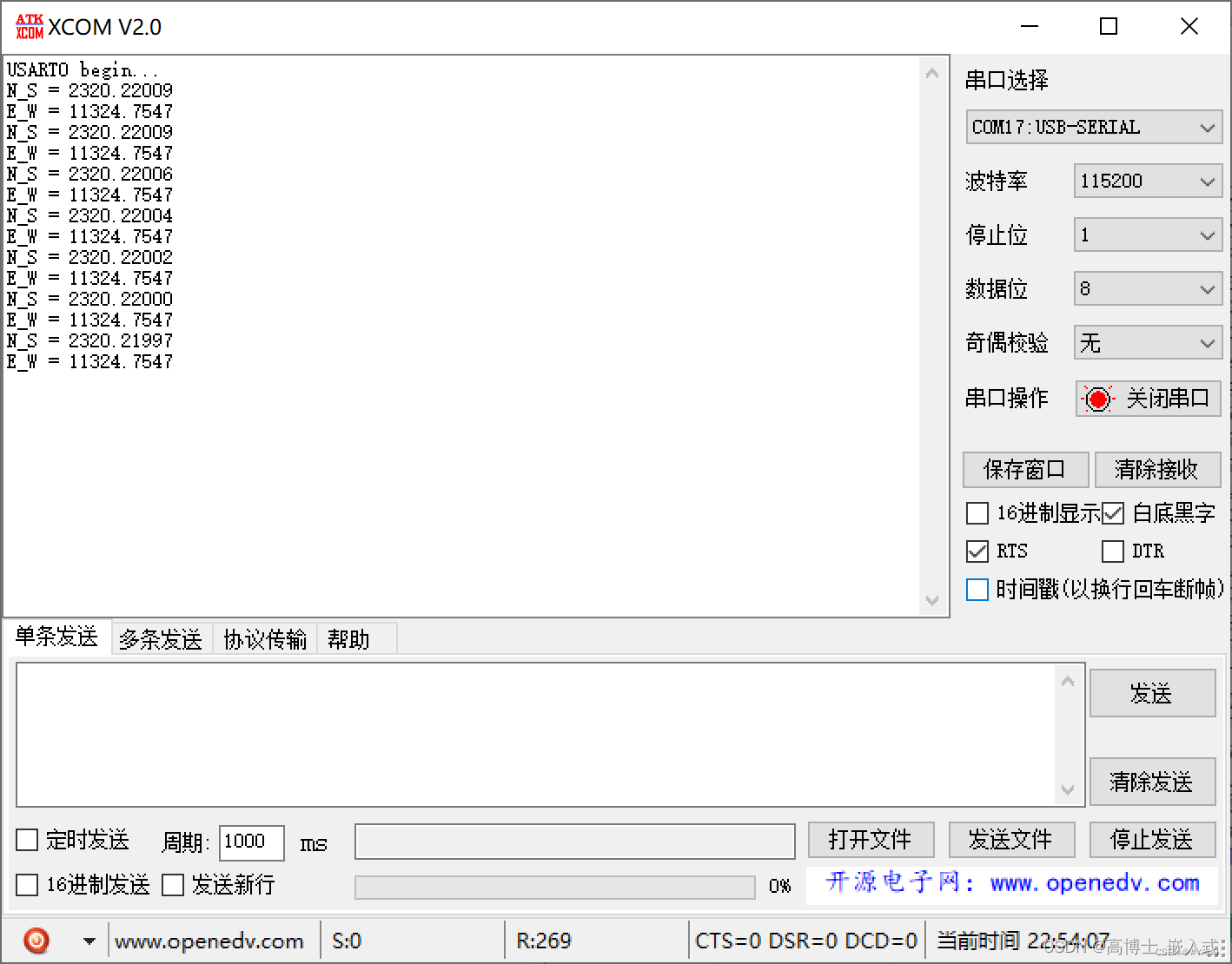
使用定位工具可以判断读取的数据是否准确。注意GPS模块要拿到室外定位,这样数据才准确。

参考
https://blog.csdn.net/YANGJIERUN/article/details/128667480
上一篇:【深度学习】详解 ViLT
相关内容
热门资讯
埃菲尔铁塔在哪 中国仿建埃菲尔...
2019年4月26日,广西南宁市,街头惊现一座巨型山寨版埃菲尔铁塔,高约20米,白色塔身,造型逼真,...
苗族的传统节日 贵州苗族节日有...
【岜沙苗族芦笙节】岜沙,苗语叫“分送”,距从江县城7.5公里,是世界上最崇拜树木并以树为神的枪手部落...
北京的名胜古迹 北京最著名的景...
北京从元代开始,逐渐走上帝国首都的道路,先是成为大辽朝五大首都之一的南京城,随着金灭辽,金代从海陵王...
长白山自助游攻略 吉林长白山游...
昨天介绍了西坡的景点详细请看链接:一个人的旅行,据说能看到长白山天池全凭运气,您的运气如何?今日介绍...
应用未安装解决办法 平板应用未...
---IT小技术,每天Get一个小技能!一、前言描述苹果IPad2居然不能安装怎么办?与此IPad不...
脚上的穴位图 脚面经络图对应的...
人体穴位作用图解大全更清晰直观的标注了各个人体穴位的作用,包括头部穴位图、胸部穴位图、背部穴位图、胳...
猫咪吃了塑料袋怎么办 猫咪误食...
你知道吗?塑料袋放久了会长猫哦!要说猫咪对塑料袋的喜爱程度完完全全可以媲美纸箱家里只要一有塑料袋的响...
demo什么意思 demo版本...
618快到了,各位的小金库大概也在准备开闸放水了吧。没有小金库的,也该向老婆撒娇卖萌服个软了,一切只...
世界上最漂亮的人 世界上最漂亮...
此前在某网上,选出了全球265万颜值姣好的女性。从这些数量庞大的女性群体中,人们投票选出了心目中最美...
埃菲尔铁塔在哪 中国仿建埃菲尔...
2019年4月26日,广西南宁市,街头惊现一座巨型山寨版埃菲尔铁塔,高约20米,白色塔身,造型逼真,...
苗族的传统节日 贵州苗族节日有...
【岜沙苗族芦笙节】岜沙,苗语叫“分送”,距从江县城7.5公里,是世界上最崇拜树木并以树为神的枪手部落...
北京的名胜古迹 北京最著名的景...
北京从元代开始,逐渐走上帝国首都的道路,先是成为大辽朝五大首都之一的南京城,随着金灭辽,金代从海陵王...
长白山自助游攻略 吉林长白山游...
昨天介绍了西坡的景点详细请看链接:一个人的旅行,据说能看到长白山天池全凭运气,您的运气如何?今日介绍...
世界上最漂亮的人 世界上最漂亮...
此前在某网上,选出了全球265万颜值姣好的女性。从这些数量庞大的女性群体中,人们投票选出了心目中最美...
应用未安装解决办法 平板应用未...
---IT小技术,每天Get一个小技能!一、前言描述苹果IPad2居然不能安装怎么办?与此IPad不...
脚上的穴位图 脚面经络图对应的...
人体穴位作用图解大全更清晰直观的标注了各个人体穴位的作用,包括头部穴位图、胸部穴位图、背部穴位图、胳...
demo什么意思 demo版本...
618快到了,各位的小金库大概也在准备开闸放水了吧。没有小金库的,也该向老婆撒娇卖萌服个软了,一切只...
猫咪吃了塑料袋怎么办 猫咪误食...
你知道吗?塑料袋放久了会长猫哦!要说猫咪对塑料袋的喜爱程度完完全全可以媲美纸箱家里只要一有塑料袋的响...