
Apollo planning之参考线平滑算法
创始人
2024-05-23 14:27:27
Apollo studio 官网:Apollo开发者社区 (baidu.com)
星火计划2.0基础课:Apollo星火计划2.0_Apollo精品课 (baidu.com)
星火计划2.0专项课:Apollo星火计划之PnC专项_Apollo精品课 (baidu.com)
目录
1 参考线的作用
2 参考线的数据结构
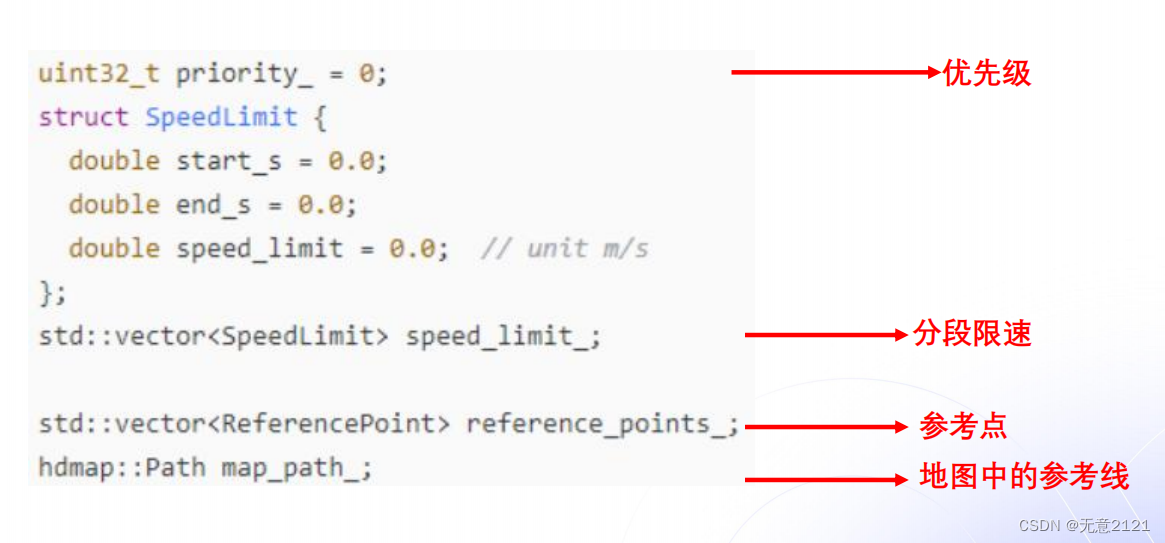
2.1 ReferenceLine的数据结构
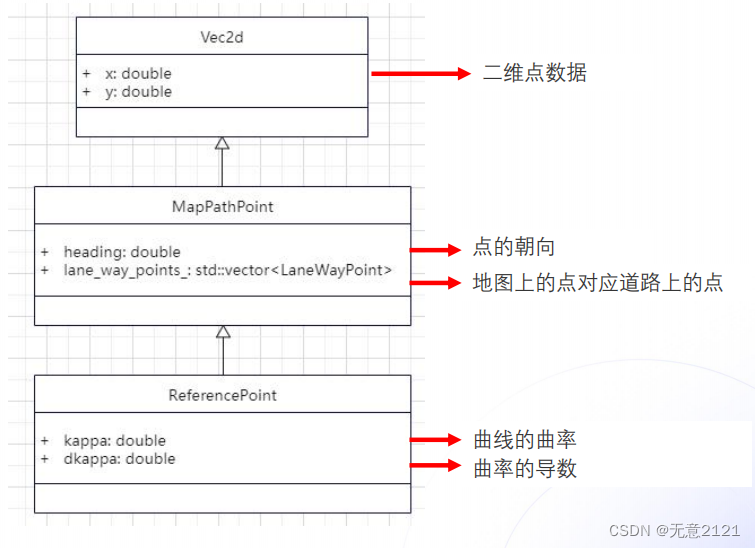
2.2 ReferencePoint的数据结构
3 参考线处理流程
4 参考线平滑算法
4.1 算法分类
4.2 参考线平滑算法流程
4.2.1 AnchorPoint
4.2.2 smooth
4.2.3 solve
5 具体算法
1 参考线的作用
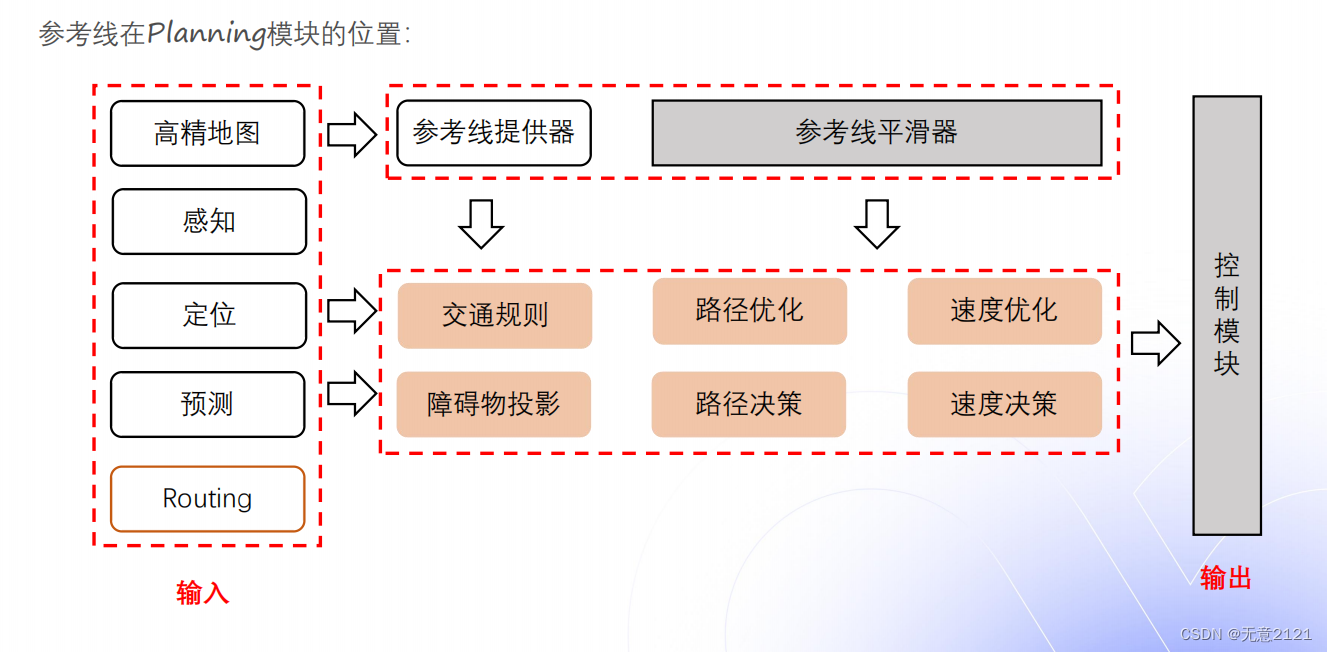
参考线在planning中的作用相当于一个地基,所有决策与优化都是在参考线的基础上进行
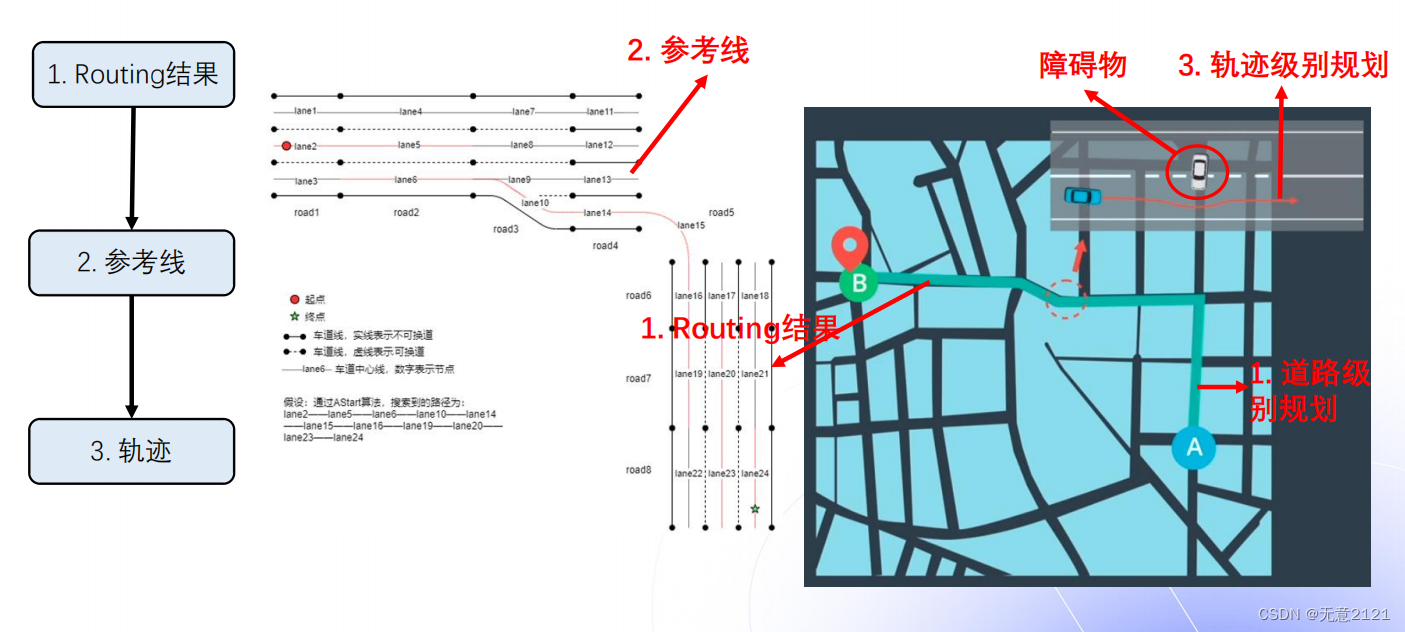
- Routing利用A*进行车道级别的规划
- 再对每一个车道赋予参考线,最后得到了车道级别的参考线
- 最后则是planning模块输出轨迹级别的规划结果
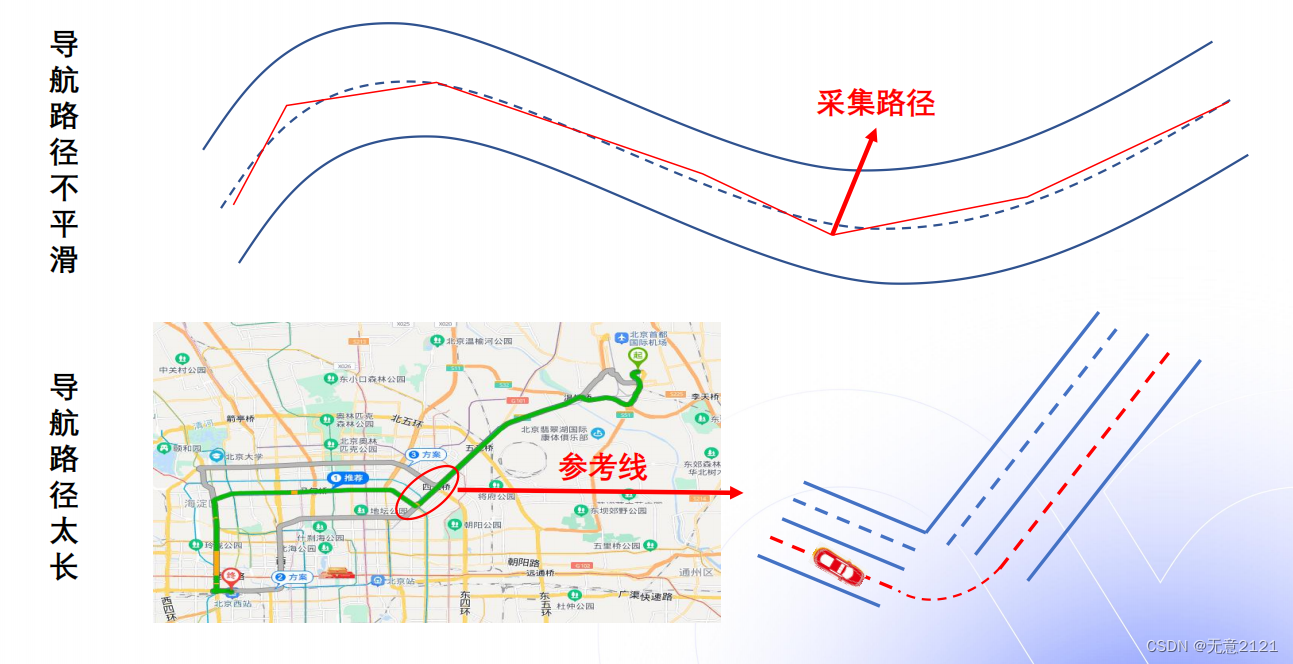
- HD map一般都是人为采集离散点,也就使得原始路径不平滑
- 同时全局导航的路径过长,障碍物的投影点也可能不唯一
- 所以我们需要生成一个局部的一定长度且光滑的参考线,也节省了算力
2 参考线的数据结构
2.1 ReferenceLine的数据结构
2.2 ReferencePoint的数据结构
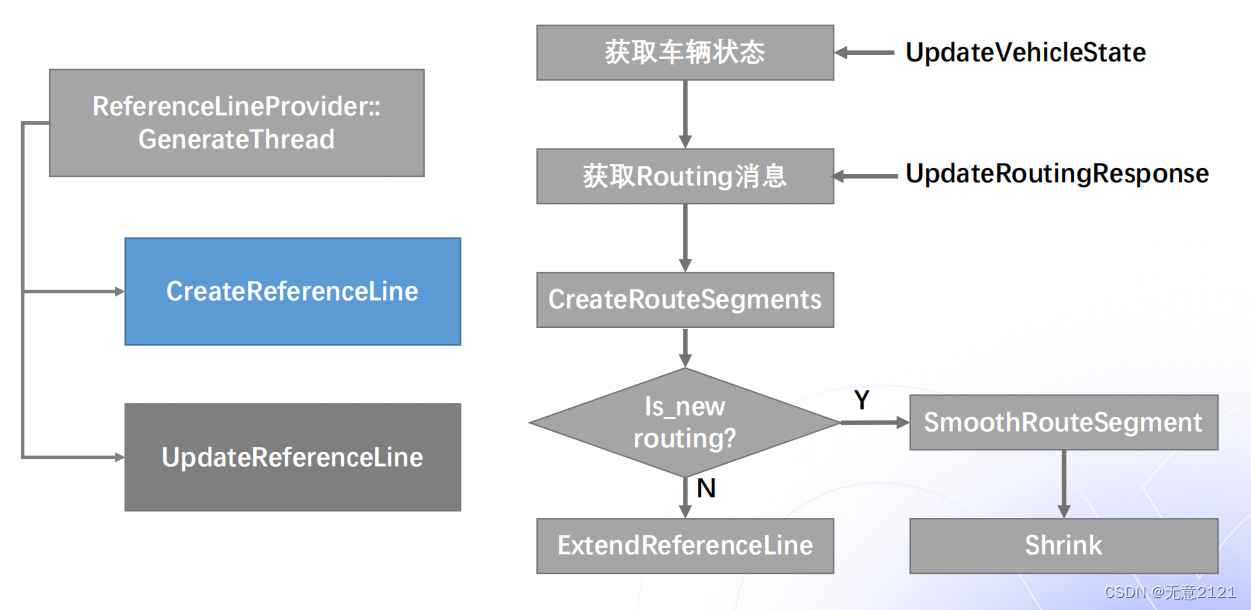
3 参考线处理流程
参考线处理分两步
- 生成参考线,这主要由Routing模块的输出决定
- 参考线平滑,接下来会详细讲解参考线的平滑的算法
 4 参考线平滑算法
4 参考线平滑算法
4.1 算法分类
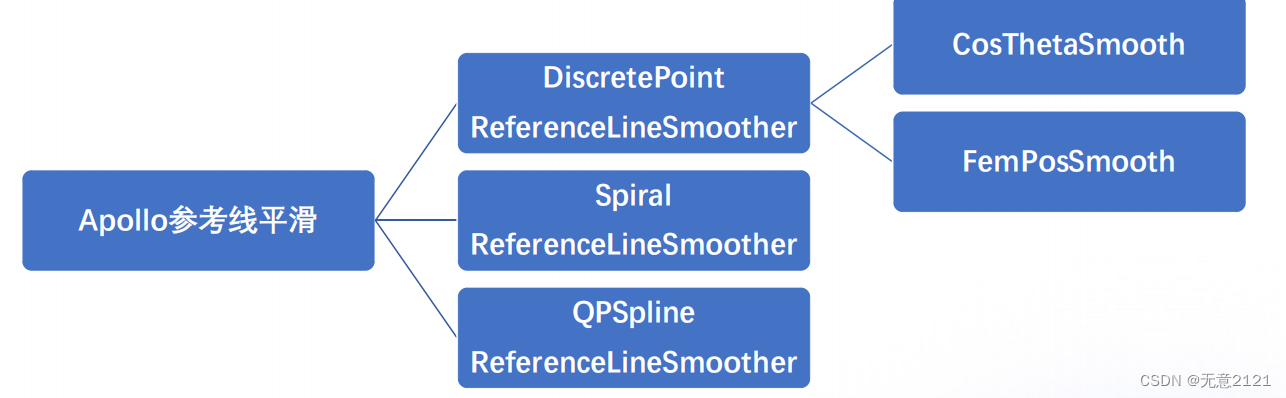
参考线平滑算法主要有三种
- 离散点平滑
- 螺旋曲线平滑
- 多项式平滑
if (smoother_config_.has_qp_spline()) {smoother_.reset(new QpSplineReferenceLineSmoother(smoother_config_));} else if (smoother_config_.has_spiral()) {smoother_.reset(new SpiralReferenceLineSmoother(smoother_config_));} else if (smoother_config_.has_discrete_points()) {smoother_.reset(new DiscretePointsReferenceLineSmoother(smoother_config_));} else {ACHECK(false) << "unknown smoother config "<< smoother_config_.DebugString();}is_initialized_ = true;这里是对参考线平滑算法进行配置,Apollo系统中默认采用离散点平滑算法
4.2 参考线平滑算法流程
bool ReferenceLineProvider::SmoothReferenceLine(const ReferenceLine &raw_reference_line, ReferenceLine *reference_line) {if (!FLAGS_enable_smooth_reference_line) {*reference_line = raw_reference_line;return true;}// generate anchor points:std::vector anchor_points;GetAnchorPoints(raw_reference_line, &anchor_points);smoother_->SetAnchorPoints(anchor_points);if (!smoother_->Smooth(raw_reference_line, reference_line)) {AERROR << "Failed to smooth reference line with anchor points";return false;}if (!IsReferenceLineSmoothValid(raw_reference_line, *reference_line)) {AERROR << "The smoothed reference line error is too large";return false;}return true;
} 输入raw_reference_line,设置中间点(GetAnchorPoints),然后smooth,最后输出
4.2.1 AnchorPoint
struct AnchorPoint {common::PathPoint path_point;double lateral_bound = 0.0;double longitudinal_bound = 0.0;// enforce smoother to strictly follow this reference pointbool enforced = false;
};lateral_bound、longitudinal_bound代表裕度,enforced代表是否是强约束
max_constraint_interval : 0.25
longitudinal_boundary_bound : 2.0
max_lateral_boundary_bound : 0.5
min_lateral_boundary_bound : 0.1
curb_shift : 0.2
lateral_buffer : 0.2这是中间点的配置文件
4.2.2 smooth
bool status = false;const auto& smoothing_method = config_.discrete_points().smoothing_method();std::vector> smoothed_point2d;switch (smoothing_method) {case DiscretePointsSmootherConfig::COS_THETA_SMOOTHING:status = CosThetaSmooth(raw_point2d, anchorpoints_lateralbound,&smoothed_point2d);break;case DiscretePointsSmootherConfig::FEM_POS_DEVIATION_SMOOTHING:status = FemPosSmooth(raw_point2d, anchorpoints_lateralbound,&smoothed_point2d);break;default:AERROR << "Smoother type not defined";return false;}if (!status) {AERROR << "discrete_points reference line smoother fails";return false; bool DiscretePointsReferenceLineSmoother::FemPosSmooth(const std::vector>& raw_point2d,const std::vector& bounds,std::vector>* ptr_smoothed_point2d) {const auto& fem_pos_config =config_.discrete_points().fem_pos_deviation_smoothing();FemPosDeviationSmoother smoother(fem_pos_config);// box contraints on pos are used in fem pos smoother, thus shrink the// bounds by 1.0 / sqrt(2.0)// 裕度收缩std::vector box_bounds = bounds;const double box_ratio = 1.0 / std::sqrt(2.0);for (auto& bound : box_bounds) {bound *= box_ratio;}std::vector opt_x;std::vector opt_y;// 问题求解bool status = smoother.Solve(raw_point2d, box_bounds, &opt_x, &opt_y);if (!status) {AERROR << "Fem Pos reference line smoothing failed";return false;}if (opt_x.size() < 2 || opt_y.size() < 2) {AERROR << "Return by fem pos smoother is wrong. Size smaller than 2 ";return false;} 4.2.3 solve
bool FemPosDeviationSmoother::Solve(const std::vector>& raw_point2d,const std::vector& bounds, std::vector* opt_x,std::vector* opt_y) {// 考虑曲率约束if (config_.apply_curvature_constraint()) {if (config_.use_sqp()) {// 线性求解return SqpWithOsqp(raw_point2d, bounds, opt_x, opt_y);} else {// 非线性求解return NlpWithIpopt(raw_point2d, bounds, opt_x, opt_y);}}// 不考虑曲率约束 else {// 线性求解(默认)return QpWithOsqp(raw_point2d, bounds, opt_x, opt_y);}return true;
} 5 具体算法
r
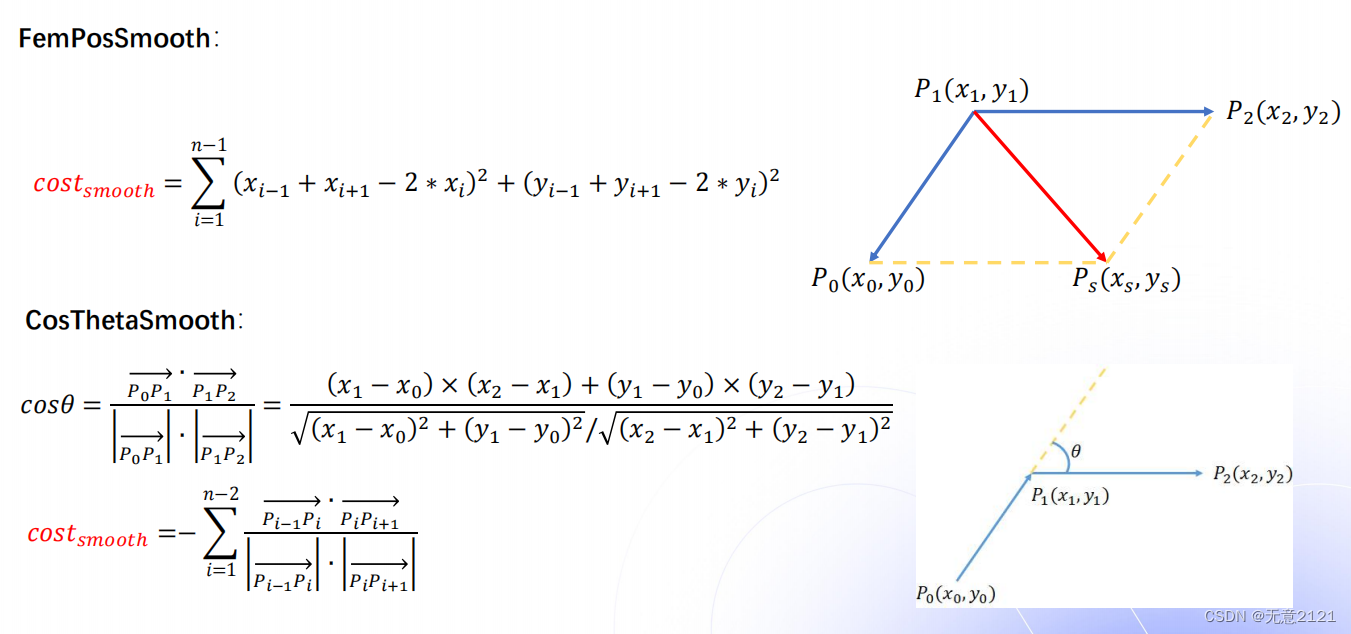
离散点平滑算法也是基于评价函数来做的,分别衡量
- 曲线平滑度
- 曲线长度
- 点与参考点的误差
对于平滑度的衡量有两种方式
- FemPosSmooth相对不精准,但是只需用二次规划能快速求解
- CosThetaSmooth相对精准,但是需要非线性规划,计算量大
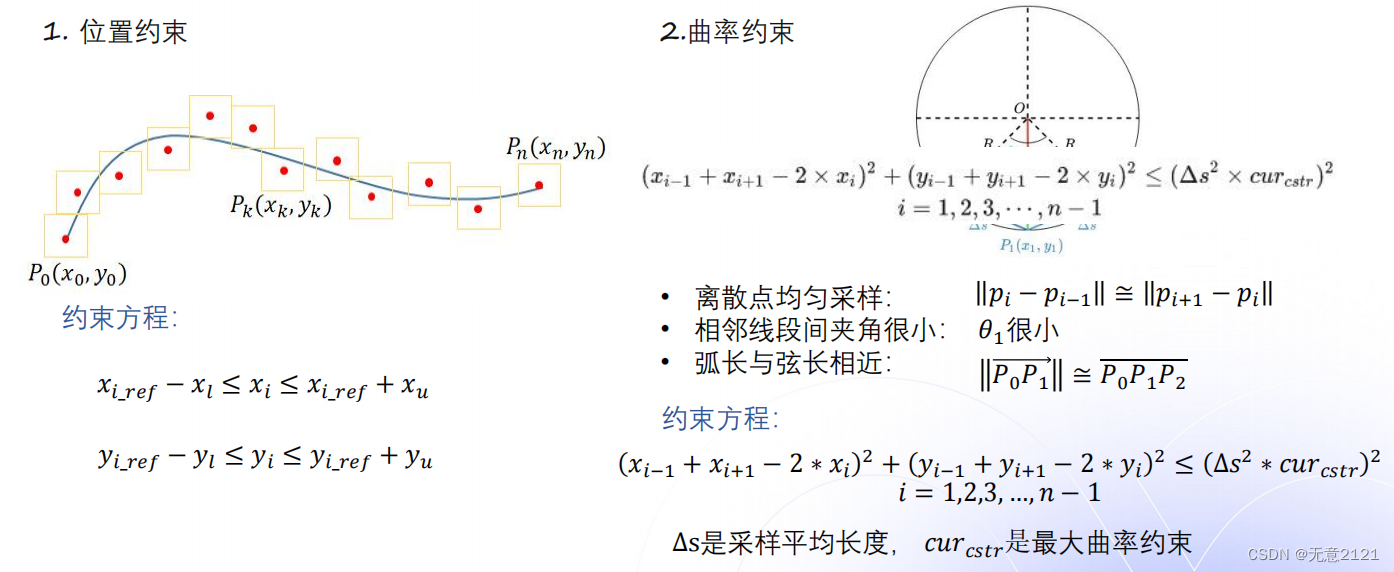 同时还需要满足约束条件
同时还需要满足约束条件
- 位置约束保证离散点相对于原来的不过于偏离
- 曲率约束使得参考线曲率尽量符合车辆运动学约束,易于跟踪
上一篇:Lombok
下一篇:webpack5从入门到精通
相关内容
热门资讯
埃菲尔铁塔在哪 中国仿建埃菲尔...
2019年4月26日,广西南宁市,街头惊现一座巨型山寨版埃菲尔铁塔,高约20米,白色塔身,造型逼真,...
苗族的传统节日 贵州苗族节日有...
【岜沙苗族芦笙节】岜沙,苗语叫“分送”,距从江县城7.5公里,是世界上最崇拜树木并以树为神的枪手部落...
北京的名胜古迹 北京最著名的景...
北京从元代开始,逐渐走上帝国首都的道路,先是成为大辽朝五大首都之一的南京城,随着金灭辽,金代从海陵王...
长白山自助游攻略 吉林长白山游...
昨天介绍了西坡的景点详细请看链接:一个人的旅行,据说能看到长白山天池全凭运气,您的运气如何?今日介绍...
应用未安装解决办法 平板应用未...
---IT小技术,每天Get一个小技能!一、前言描述苹果IPad2居然不能安装怎么办?与此IPad不...
脚上的穴位图 脚面经络图对应的...
人体穴位作用图解大全更清晰直观的标注了各个人体穴位的作用,包括头部穴位图、胸部穴位图、背部穴位图、胳...
猫咪吃了塑料袋怎么办 猫咪误食...
你知道吗?塑料袋放久了会长猫哦!要说猫咪对塑料袋的喜爱程度完完全全可以媲美纸箱家里只要一有塑料袋的响...
demo什么意思 demo版本...
618快到了,各位的小金库大概也在准备开闸放水了吧。没有小金库的,也该向老婆撒娇卖萌服个软了,一切只...
世界上最漂亮的人 世界上最漂亮...
此前在某网上,选出了全球265万颜值姣好的女性。从这些数量庞大的女性群体中,人们投票选出了心目中最美...
埃菲尔铁塔在哪 中国仿建埃菲尔...
2019年4月26日,广西南宁市,街头惊现一座巨型山寨版埃菲尔铁塔,高约20米,白色塔身,造型逼真,...
苗族的传统节日 贵州苗族节日有...
【岜沙苗族芦笙节】岜沙,苗语叫“分送”,距从江县城7.5公里,是世界上最崇拜树木并以树为神的枪手部落...
北京的名胜古迹 北京最著名的景...
北京从元代开始,逐渐走上帝国首都的道路,先是成为大辽朝五大首都之一的南京城,随着金灭辽,金代从海陵王...
长白山自助游攻略 吉林长白山游...
昨天介绍了西坡的景点详细请看链接:一个人的旅行,据说能看到长白山天池全凭运气,您的运气如何?今日介绍...
世界上最漂亮的人 世界上最漂亮...
此前在某网上,选出了全球265万颜值姣好的女性。从这些数量庞大的女性群体中,人们投票选出了心目中最美...
应用未安装解决办法 平板应用未...
---IT小技术,每天Get一个小技能!一、前言描述苹果IPad2居然不能安装怎么办?与此IPad不...
脚上的穴位图 脚面经络图对应的...
人体穴位作用图解大全更清晰直观的标注了各个人体穴位的作用,包括头部穴位图、胸部穴位图、背部穴位图、胳...
demo什么意思 demo版本...
618快到了,各位的小金库大概也在准备开闸放水了吧。没有小金库的,也该向老婆撒娇卖萌服个软了,一切只...
猫咪吃了塑料袋怎么办 猫咪误食...
你知道吗?塑料袋放久了会长猫哦!要说猫咪对塑料袋的喜爱程度完完全全可以媲美纸箱家里只要一有塑料袋的响...