
carla和ros不通过carla_ros_bridge进行lidar发送
创始人
2025-05-28 17:42:44
前言:
利用ros通讯机制,将carla中采集到的点云转换为pointcloud2格式然后发布出去。
第一步:
搭建好ros基础环境
1.创建工作空间并初始化
mkdir -p 自定义空间名称/src
cd 自定义空间名称
catkin_make2.进入src创建ros包并添加依赖
cd src
catkin_create_pkg 自定义ROS包名 roscpp rospy std_msgs3.进入ros包添加scripts目录并编辑python文件
cd ros包
mkdir scripts4.新建 python 文件并为 python 文件添加可执行权限
#! /usr/bin/env pythonimport rospy
from sensor_msgs.msg import PointCloud2
from sensor_msgs.msg import PointField添加权限
chmod +x 自定义文件名.py5.编辑 ros 包下的 CamkeList.txt 文件
catkin_install_python(PROGRAMS scripts/自定义文件名.pyDESTINATION ${CATKIN_PACKAGE_BIN_DESTINATION}
)6.直接roscore然后catkin_make最后rosrun xxx xxx
关于ros部分的准备到此为止。
第二步:
对于lidar的设置
# 创建激光lidarlidar_bp = blueprint_library.find('sensor.lidar.ray_cast')lidar_bp.set_attribute('channels', str(32))lidar_bp.set_attribute('points_per_second', str(90000))lidar_bp.set_attribute('rotation_frequency', str(40))lidar_bp.set_attribute('range', str(20))lidar1_location = carla.Location(195, -165, 1)lidar1_rotation = carla.Rotation(0, 0, 0)lidar1_transform = carla.Transform(lidar1_location, lidar1_rotation)lidar1 = world.spawn_actor(lidar_bp, lidar1_transform)lidar1.listen(lambda data: lidar_callback(data)) 关键是lidar_callback函数
第三步:
lidar_callback函数
pub = rospy.Publisher('pointcloud_topic', PointCloud2, queue_size=5)
rospy.init_node('pointcloud_publisher_node', anonymous=True)
# rate = rospy.Rate(1)# 将carla中的激光lidar转换为ros中的pointcloud2格式发布
def lidar_callback(point_cloud):data = np.copy(np.frombuffer(point_cloud.raw_data, dtype=np.dtype('f4')))data = np.reshape(data, (int(data.shape[0] / 4), 4))print(data.shape)points = data[:, :-1]print(points.shape)msg = PointCloud2()msg.header.stamp = rospy.Time().now()msg.header.frame_id = "lidar1"msg.height = 1msg.width = len(points)msg.fields = [PointField('x', 0, PointField.FLOAT32, 1),PointField('y', 4, PointField.FLOAT32, 1),PointField('z', 8, PointField.FLOAT32, 1)]msg.is_bigendian = Falsemsg.point_step = 12msg.row_step = msg.point_step * points.shape[0]msg.is_dense = Falsemsg.data = np.asarray(points, np.float32).tostring()pub.publish(msg)print("published...")# rate.sleep()carla中的采集的lidar数据是4d的,除了x,y,z外还有i,强度信息。而ros中PointCloud2格式是没有强度信息的,所以直接取前三维就可以了。然后就是将消息格式进行转换,其他sensor的格式转换类似。
总结:
成功运行:
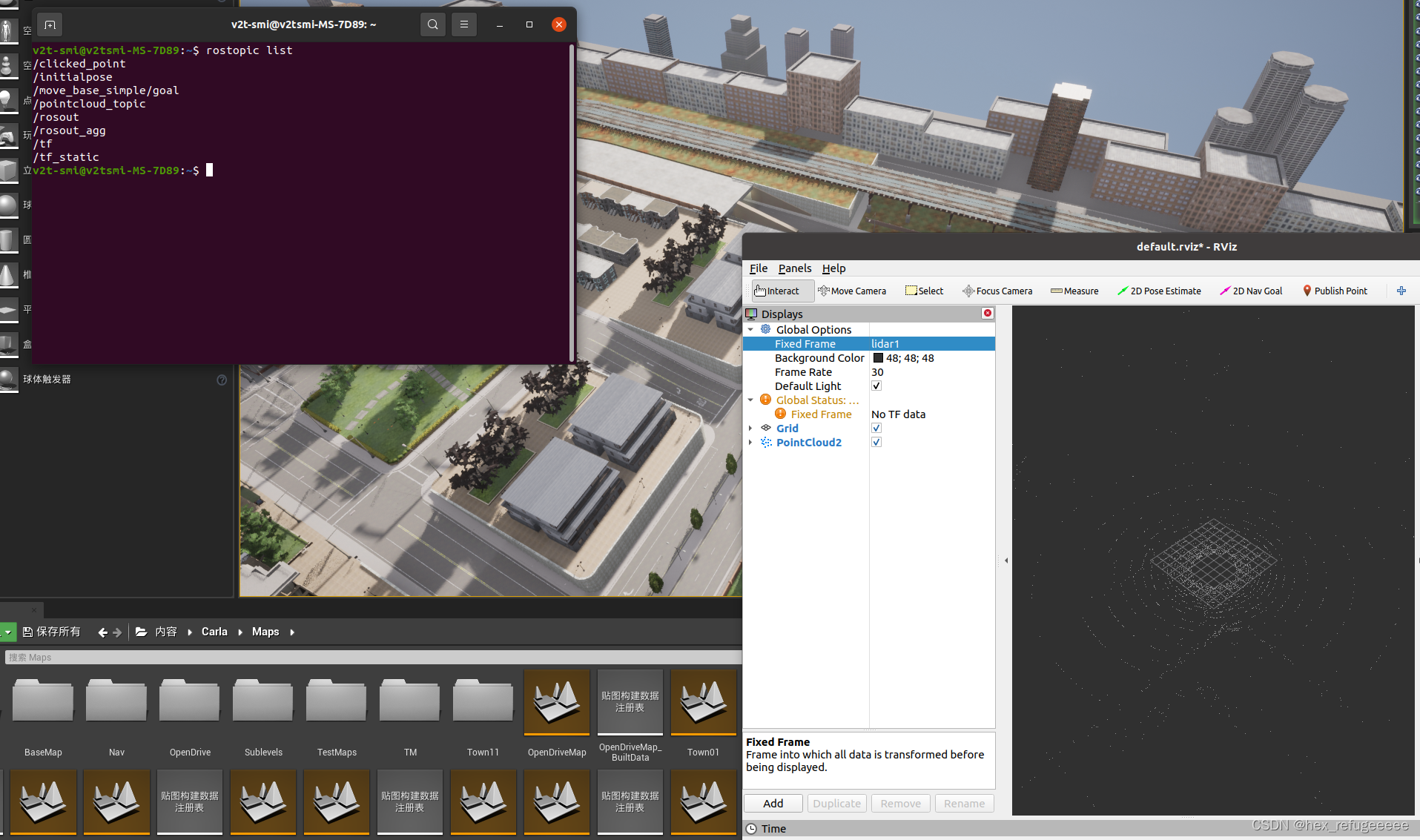 相当于以后可以直接通过ros来发布topic了。
相当于以后可以直接通过ros来发布topic了。
相关内容
热门资讯
埃菲尔铁塔在哪 中国仿建埃菲尔...
2019年4月26日,广西南宁市,街头惊现一座巨型山寨版埃菲尔铁塔,高约20米,白色塔身,造型逼真,...
北京的名胜古迹 北京最著名的景...
北京从元代开始,逐渐走上帝国首都的道路,先是成为大辽朝五大首都之一的南京城,随着金灭辽,金代从海陵王...
苗族的传统节日 贵州苗族节日有...
【岜沙苗族芦笙节】岜沙,苗语叫“分送”,距从江县城7.5公里,是世界上最崇拜树木并以树为神的枪手部落...
应用未安装解决办法 平板应用未...
---IT小技术,每天Get一个小技能!一、前言描述苹果IPad2居然不能安装怎么办?与此IPad不...
长白山自助游攻略 吉林长白山游...
昨天介绍了西坡的景点详细请看链接:一个人的旅行,据说能看到长白山天池全凭运气,您的运气如何?今日介绍...
脚上的穴位图 脚面经络图对应的...
人体穴位作用图解大全更清晰直观的标注了各个人体穴位的作用,包括头部穴位图、胸部穴位图、背部穴位图、胳...
猫咪吃了塑料袋怎么办 猫咪误食...
你知道吗?塑料袋放久了会长猫哦!要说猫咪对塑料袋的喜爱程度完完全全可以媲美纸箱家里只要一有塑料袋的响...
demo什么意思 demo版本...
618快到了,各位的小金库大概也在准备开闸放水了吧。没有小金库的,也该向老婆撒娇卖萌服个软了,一切只...
世界上最漂亮的人 世界上最漂亮...
此前在某网上,选出了全球265万颜值姣好的女性。从这些数量庞大的女性群体中,人们投票选出了心目中最美...
埃菲尔铁塔在哪 中国仿建埃菲尔...
2019年4月26日,广西南宁市,街头惊现一座巨型山寨版埃菲尔铁塔,高约20米,白色塔身,造型逼真,...
北京的名胜古迹 北京最著名的景...
北京从元代开始,逐渐走上帝国首都的道路,先是成为大辽朝五大首都之一的南京城,随着金灭辽,金代从海陵王...
苗族的传统节日 贵州苗族节日有...
【岜沙苗族芦笙节】岜沙,苗语叫“分送”,距从江县城7.5公里,是世界上最崇拜树木并以树为神的枪手部落...
长白山自助游攻略 吉林长白山游...
昨天介绍了西坡的景点详细请看链接:一个人的旅行,据说能看到长白山天池全凭运气,您的运气如何?今日介绍...
应用未安装解决办法 平板应用未...
---IT小技术,每天Get一个小技能!一、前言描述苹果IPad2居然不能安装怎么办?与此IPad不...
猫咪吃了塑料袋怎么办 猫咪误食...
你知道吗?塑料袋放久了会长猫哦!要说猫咪对塑料袋的喜爱程度完完全全可以媲美纸箱家里只要一有塑料袋的响...
脚上的穴位图 脚面经络图对应的...
人体穴位作用图解大全更清晰直观的标注了各个人体穴位的作用,包括头部穴位图、胸部穴位图、背部穴位图、胳...
demo什么意思 demo版本...
618快到了,各位的小金库大概也在准备开闸放水了吧。没有小金库的,也该向老婆撒娇卖萌服个软了,一切只...
世界上最漂亮的人 世界上最漂亮...
此前在某网上,选出了全球265万颜值姣好的女性。从这些数量庞大的女性群体中,人们投票选出了心目中最美...