
DBB Code Learning
文章目录
- **[原文](https://arxiv.org/abs/2103.13425)**
- READM.md
- Abstract
- Use our pretrained models
- Convert the training-time models into inference-time
- ImageNet training
- Use like this in your own code
- FAQs
- Structural Re-parameterization Universe
- abc.py
- class ACBlock(nn.Module)
- 参数
- deploy
- others
- alexnet.py
- dbb_transforms.py
- convnet_utils.py
- 补充(组卷积)
- 普通卷积
- 组卷积(group convolution)
- 深度可分离卷积(Depthwise seperable convolution)
- Depthwise Convolution
- Pointwise Convolution
- 补充(一些方法)
- nn.Identity()
- hasattr( )
- 代码
- convert.py
- 补充(argparse)
- 补充(conv.weight.data)
- 补充(__delattr__)
- 代码
- dbb_verify.py
- diversebranchblock.py
- moblienet.py
- resnet.py
- test.py
- train.py
- utils.py
原文
READM.md
Diverse Branch Block: Building a Convolution as an Inception-like Unit
DBB是一种可以替代常规卷积的ConvNet(Convolutional Neural Network)的模块,使用它可以提高精度且不以增加推理时间损耗为成本。
you can also get the equivalnet kernel and bias in a differentiable way at any time(get_equivalent_kernel_bias in diversebranchblock.py)
Abstract
1、提出一个CNNs的模块DBB替换网络中的常规卷积,该模块可以不以增加推理时间损耗为成本的提高精度;
2、DBB包含六个分支及对应转换措施;
3、鲁棒性高,在分类、目标检测及分割中都获得了较好的成绩
Use our pretrained models
1、百度云可以下载文中提到的实验模型(https://pan.baidu.com/s/1wPaQnLKyNjF_bEMNRo4z6Q, “dbbk”)
2、为便于在其他任务上进行迁移学习,提供了训练和推理模型(以RESnET18为例,IMGNET_PATH 指的是"train"和"val"的根目录 ),示例代码如下:
python test.py IMGNET_PATH train ResNet-18_DBB_7101.pth -a ResNet-18 -t DBB
Convert the training-time models into inference-time
通过convert.py来将训练模型转化为推力模型
python convert.py [weights file of the training-time model to load] [path to save] -a [architecture name]
# exmaple
python convert.py ResNet-18_DBB_7101.pth ResNet-18_DBB_7101_deploy.pth -a ResNet-18
随后通过test.py来使用推理模型实现预测,参数“deploy”构建推理模型。
python test.py IMGNET_PATH deploy ResNet-18_DBB_7101_deploy.pth -a ResNet-18 -t DBB
ImageNet training
项目相较于pytorch官方展示,改进部分包括模型构建部分和余弦学习率策略等,训练和测试案例如下
python train.py -a ResNet-18 -t DBB --dist-url tcp://127.0.0.1:23333 --dist-backend nccl --multiprocessing-distributed --world-size 1 --rank 0 --workers 64 IMGNET_PATH
python test.py IMGNET_PATH train model_best.pth.tar -a ResNet-18
Use like this in your own code
假定你的模型为以下样式
class SomeModel(nn.Module):def __init__(self, ...):...self.some_conv = nn.Conv2d(...)self.some_bn = nn.BatchNorm2d(...)...def forward(self, inputs):out = ...out = self.some_bn(self.some_conv(out))...
对于训练,可以用DBB来替代conv-BN,这样你的模型就变成如下所示
class SomeModel(nn.Module):def __init__(self, ...):...self.some_dbb = DiverseBranchBlock(..., deploy=False)...def forward(self, inputs):out = ...out = self.some_dbb(out)...
训练模型就像训练其他常规模型一样,随后,调用每个DBB的switch_to_deploy,测试并保存
model = SomeModel(...)
train(model)
for m in train_model.modules():if hasattr(m, 'switch_to_deploy'):m.switch_to_deploy()
test(model)
save(model)
FAQs
Q: Is the inference-time model’s output the same as the training-time model?
A:是的,你可以通过以下验证
python dbb_verify.py
Q: What is the relationship between DBB and RepVGG?
RepVGG是一种普通的体系结构,RepVGG块与单个3x3 conv相比没有任何优势(正如RepVGG论文中报道的那样,它仅提高Resnet50 0.03%)。DBB是一个通用的构建块,可以在许多体系结构上使用。
Structural Re-parameterization Universe
RepLKNet (CVPR 2022)→→→→https://arxiv.org/abs/2203.06717)\ code
RepOptimizer (ICLR 2023) →→→→https://arxiv.org/pdf/2205.15242.pdf)\ code
RepVGG (CVPR 2021) →→→→https://arxiv.org/abs/2101.03697)\ code
RepMLP (CVPR 2022)→→→→https://arxiv.org/abs/2112.11081)\ code
ResRep (ICCV 2021) →→→→https://openaccess.thecvf.com/content/ICCV2021/papers/Ding_ResRep_Lossless_CNN_Pruning_via_Decoupling_Remembering_and_Forgetting_ICCV_2021_paper.pdf)\ code
ACB (ICCV 2019)→→→→http://openaccess.thecvf.com/content_ICCV_2019/papers/Ding_ACNet_Strengthening_the_Kernel_Skeletons_for_Powerful_CNN_via_Asymmetric_ICCV_2019_paper.pdf).\ code
DBB (CVPR 2021)→→→→https://arxiv.org/abs/2103.13425)\ code
abc.py
class ACBlock(nn.Module)
参数
in_channels, 输入通道
out_channels, 输出通道
kernel_size, 卷积核大小
stride=1, 步长
padding=0, 补0
dilation=1, 空洞率
groups=1, 组卷积数
padding_mode=‘zeros’, padding模式
deploy=False,
use_affine=True,
reduce_gamma=False,
gamma_init=None
deploy
# if deploy = true 会产生一个由输入参数构成的普通conv# else deploy = False,首先会根据参数产生一个conv-BNdef __init__(self, in_channels, out_channels, kernel_size, stride=1, padding=0, dilation=1, groups=1, padding_mode='zeros', deploy=False,use_affine=True, reduce_gamma=False, gamma_init=None ):super(ACBlock, self).__init__()self.deploy = deployif deploy:self.fused_conv = nn.Conv2d(in_channels=in_channels, out_channels=out_channels, kernel_size=(kernel_size,kernel_size), stride=stride,padding=padding, dilation=dilation, groups=groups, bias=True, padding_mode=padding_mode)else:self.square_conv = nn.Conv2d(in_channels=in_channels, out_channels=out_channels,kernel_size=(kernel_size, kernel_size), stride=stride,padding=padding, dilation=dilation, groups=groups, bias=False,padding_mode=padding_mode)self.square_bn = nn.BatchNorm2d(num_features=out_channels, affine=use_affine)if padding - kernel_size // 2 >= 0:# Common use case. E.g., k=3, p=1 or k=5, p=2self.crop = 0# Compared to the KxK layer, the padding of the 1xK layer and Kx1 layer should be adjust to align the sliding windows (Fig 2 in the paper)hor_padding = [padding - kernel_size // 2, padding]ver_padding = [padding, padding - kernel_size // 2]else:# A negative "padding" (padding - kernel_size//2 < 0, which is not a common use case) is cropping.# Since nn.Conv2d does not support negative padding, we implement it manuallyself.crop = kernel_size // 2 - paddinghor_padding = [0, padding]ver_padding = [padding, 0]self.ver_conv = nn.Conv2d(in_channels=in_channels, out_channels=out_channels, kernel_size=(kernel_size, 1),stride=stride,padding=ver_padding, dilation=dilation, groups=groups, bias=False,padding_mode=padding_mode)self.hor_conv = nn.Conv2d(in_channels=in_channels, out_channels=out_channels, kernel_size=(1, kernel_size),stride=stride,padding=hor_padding, dilation=dilation, groups=groups, bias=False,padding_mode=padding_mode)self.ver_bn = nn.BatchNorm2d(num_features=out_channels, affine=use_affine)self.hor_bn = nn.BatchNorm2d(num_features=out_channels, affine=use_affine)if reduce_gamma:self.init_gamma(1.0 / 3)if gamma_init is not None:assert not reduce_gammaself.init_gamma(gamma_init)
others
def _fuse_bn_tensor(self, conv, bn):std = (bn.running_var + bn.eps).sqrt()t = (bn.weight / std).reshape(-1, 1, 1, 1)return conv.weight * t, bn.bias - bn.running_mean * bn.weight / stddef _add_to_square_kernel(self, square_kernel, asym_kernel):asym_h = asym_kernel.size(2)asym_w = asym_kernel.size(3)square_h = square_kernel.size(2)square_w = square_kernel.size(3)square_kernel[:, :, square_h // 2 - asym_h // 2: square_h // 2 - asym_h // 2 + asym_h,square_w // 2 - asym_w // 2: square_w // 2 - asym_w // 2 + asym_w] += asym_kerneldef get_equivalent_kernel_bias(self):hor_k, hor_b = self._fuse_bn_tensor(self.hor_conv, self.hor_bn)ver_k, ver_b = self._fuse_bn_tensor(self.ver_conv, self.ver_bn)square_k, square_b = self._fuse_bn_tensor(self.square_conv, self.square_bn)self._add_to_square_kernel(square_k, hor_k)self._add_to_square_kernel(square_k, ver_k)return square_k, hor_b + ver_b + square_bdef switch_to_deploy(self):deploy_k, deploy_b = self.get_equivalent_kernel_bias()self.deploy = Trueself.fused_conv = nn.Conv2d(in_channels=self.square_conv.in_channels,out_channels=self.square_conv.out_channels,kernel_size=self.square_conv.kernel_size, stride=self.square_conv.stride,padding=self.square_conv.padding, dilation=self.square_conv.dilation,groups=self.square_conv.groups, bias=True,padding_mode=self.square_conv.padding_mode)self.__delattr__('square_conv')self.__delattr__('square_bn')self.__delattr__('hor_conv')self.__delattr__('hor_bn')self.__delattr__('ver_conv')self.__delattr__('ver_bn')self.fused_conv.weight.data = deploy_kself.fused_conv.bias.data = deploy_bdef init_gamma(self, gamma_value):init.constant_(self.square_bn.weight, gamma_value)init.constant_(self.ver_bn.weight, gamma_value)init.constant_(self.hor_bn.weight, gamma_value)print('init gamma of square, ver and hor as ', gamma_value)def single_init(self):init.constant_(self.square_bn.weight, 1.0)init.constant_(self.ver_bn.weight, 0.0)init.constant_(self.hor_bn.weight, 0.0)print('init gamma of square as 1, ver and hor as 0')def forward(self, input):if self.deploy:return self.fused_conv(input)else:square_outputs = self.square_conv(input)square_outputs = self.square_bn(square_outputs)if self.crop > 0:ver_input = input[:, :, :, self.crop:-self.crop]hor_input = input[:, :, self.crop:-self.crop, :]else:ver_input = inputhor_input = inputvertical_outputs = self.ver_conv(ver_input)vertical_outputs = self.ver_bn(vertical_outputs)horizontal_outputs = self.hor_conv(hor_input)horizontal_outputs = self.hor_bn(horizontal_outputs)result = square_outputs + vertical_outputs + horizontal_outputsreturn result
alexnet.py
定义alexnet
import torch.nn as nn
import torch.nn.functional as F
from convnet_utils import conv_bn, conv_bn_reludef create_stem(channels):stem = nn.Sequential()stem.add_module('conv1', conv_bn_relu(in_channels=3, out_channels=channels[0], kernel_size=11, stride=4, padding=2))stem.add_module('maxpool1', nn.Maxpool2d(kernel_size=3, stride=2))stem.add_module('conv2', conv_bn_relu(in_channels=channels[0], out_channels=channels[1], kernel_size=5, padding=2))stem.add_module('maxpool2', nn.Maxpool2d(kernel_size=3, stride=2))stem.add_module('conv3', conv_bn_relu(in_channels=channels[1], out_channels=channels[2], kernel_size=3, padding=1))stem.add_module('conv4', conv_bn_relu(in_channels=channels[2], out_channels=channels[3], kernel_size=3, padding=1))stem.add_module('conv5', conv_bn_relu(in_channels=channels[3], out_channels=channels[4], kernel_size=3, padding=1))stem.add_module('maxpool3', nn.Maxpool2d(kernel_size=3, stride=2))return stemclass AlexNet(nn.Module):def __init__(self):super(AlexNet, self).__init__()channels = [64, 192, 384, 384, 256]self.stem = create_stem(channels)self.linear1 = nn.Linear(in_features=channels[4] * 6 * 6, out_features=4096)self.relu1 = nn.ReLU()self.drop1 = nn.Dropout(0.5)self.linear2 = nn.Linear(in_features=4096, out_features=4096)self.relu2 = nn.ReLU()self.drop2 = nn.Dropout(0.5)self.linear3 = nn.Linear(in_features=4096, out_features=1000)def forward(self, x):out = self.stem(x)out = out.view(out.size(0), -1)out = self.linear1(out)out = self.relu1(out)out = self.drop1(out)out = self.linear2(out)out = self.relu2(out)out = self.drop2(out)out = self.linear3(out)return outdef create_AlexNet():return AlexNet()
dbb_transforms.py
定义dbb六种转换方式的代码
import torch
import numpy as np
import torch.nn.functional as Fdef transI_fusebn(kernel, bn):gamma = bn.weightstd = (bn.running_var + bn.eps).sqrt()return kernel * ((gamma / std).reshape(-1, 1, 1, 1)), bn.bias - bn.running_mean * gamma / stddef transII_addbranch(kernels, biases):return sum(kernels), sum(biases)def transIII_1x1_kxk(k1, b1, k2, b2, groups):if groups == 1:k = F.conv2d(k2, k1.permute(1, 0, 2, 3)) #b_hat = (k2 * b1.reshape(1, -1, 1, 1)).sum((1, 2, 3))else:k_slices = []b_slices = []k1_T = k1.permute(1, 0, 2, 3)k1_group_width = k1.size(0) // groupsk2_group_width = k2.size(0) // groupsfor g in range(groups):k1_T_slice = k1_T[:, g * k1_group_width:(g + 1) * k1_group_width, :, :]k2_slice = k2[g * k2_group_width:(g + 1) * k2_group_width, :, :, :]k_slices.append(F.conv2d(k2_slice, k1_T_slice))b_slices.append((k2_slice * b1[g * k1_group_width:(g + 1) * k1_group_width].reshape(1, -1, 1, 1)).sum((1, 2, 3)))k, b_hat = transIV_depthconcat(k_slices, b_slices)return k, b_hat + b2def transIV_depthconcat(kernels, biases):return torch.cat(kernels, dim=0), torch.cat(biases)def transV_avg(channels, kernel_size, groups):input_dim = channels // groupsk = torch.zeros((channels, input_dim, kernel_size, kernel_size))k[np.arange(channels), np.tile(np.arange(input_dim), groups), :, :] = 1.0 / kernel_size ** 2return k# This has not been tested with non-square kernels (kernel.size(2) != kernel.size(3)) nor even-size kernels
def transVI_multiscale(kernel, target_kernel_size):H_pixels_to_pad = (target_kernel_size - kernel.size(2)) // 2W_pixels_to_pad = (target_kernel_size - kernel.size(3)) // 2return F.pad(kernel, [H_pixels_to_pad, H_pixels_to_pad, W_pixels_to_pad, W_pixels_to_pad])convnet_utils.py
定义部分基础函数,应用在convert.py中。
补充(组卷积)
普通卷积
首先,我们先明确一下普通卷积的过程,当我们定义如下卷积时,输入三通道,输出四通道,在卷积时会产生四个卷积核,每个卷积核的维度与输入相一致;在卷积过程中,输入和每个卷积核对应通道进行卷积操作随后代数相加生成一张特征图,并以相同操作生成剩余特征图,这便是普通卷积。
nn.Conv2d(in_channels=3,out_channels=4,kernel_size=3)
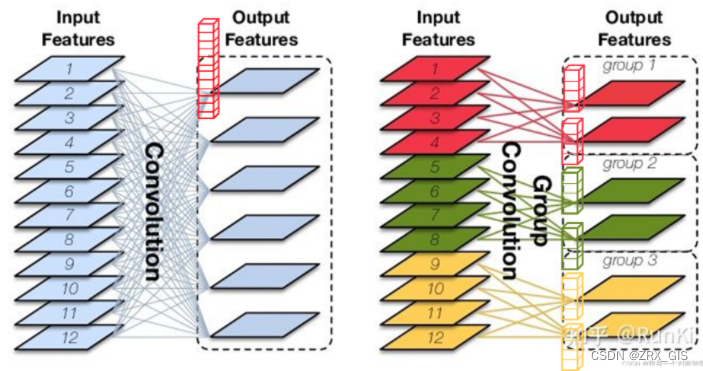
组卷积(group convolution)
下图中,图左为普通卷积,图右为组卷积,两者直观地差异就很明显了,组卷积顾名思义要分组,而普通卷积只需要直接卷积即可,当然具体计算过程和原理并非这么简单,红色小堆叠快就是一个卷积核。
图中想展示的是一张特征图通过普通卷积和组卷积由12维度变为6维度的过程。首先,我们可以直观看出的是无论是组卷积还是普通卷积,卷积核的个数是一致的,但是,以图中三组为例,对于每个卷积核来说,组卷积卷积核的维度是普通卷积的三分之一。
深度可分离卷积(Depthwise seperable convolution)
我们进一步推广,实质上MoblieNet系列中所使用的深度可分离卷积中的depthwise卷积就是(组数=输入通道=输出通道)的分组卷积,在操作上就是把每个3通道的卷积核砍成1通道的卷积核,但是卷积核的数量还是3个。
深度可分离卷积分为Depthwise Convolution和Pointwise Convolution。
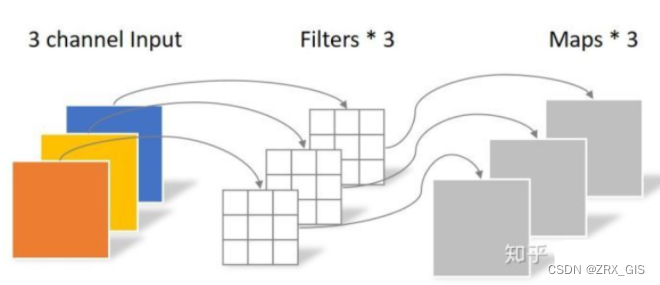
Depthwise Convolution
Depthwise Convolution就是组卷积,一个卷积核负责一个通道,一个通道只被一个卷积核卷积,最会保证所产生的featuremap通道数和输入通道数一致。
我们以知乎上的一张图为例,将一张三通道的彩图作为输入,经Depthwise Convolution不会改变图像的通道数,因此最终输出为通道数为3的特征图。
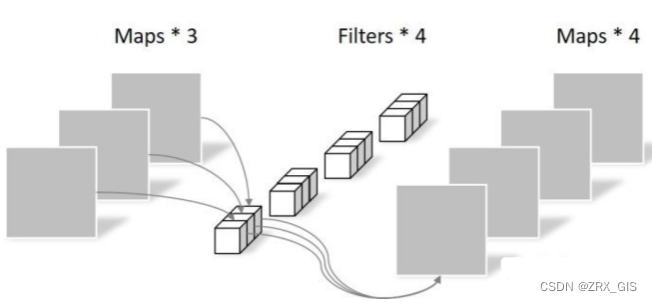
Pointwise Convolution
Depthwise Convolution的弊端在运算时已经被充分暴露,即这种运算对输入层的每个通道独立计算,没有有效的利用不同通道在相同像素位置的特征信息,其实,这也可以说是组卷积的通病。在moblienet中则是以Pointwise Convolution来弥补这个问题。
Pointwise Convolution的运算和常规卷积运算基本一致,它使用的是1x1conv,所以这里的卷及操作会将上一步的feature map在深度方向上进行加权组合,生成新的特征。
所以抛开华丽的外表,Pointwise Convolution实际上就是我们现在常用于改变通道维度的1x1conv。
补充(一些方法)
nn.Identity()
nn.Identity()实质上就是一个线性映射 f(x)=x,在官方文档中给出了这样的解释:nn.Identity() will just return its input, but does not show that it is a view.nn.Identity will just return the input without any clone usage or manipulation of the input. The input and output would thus be the same.You might not want to use this layer as it’s not “doing anything” besides just returning the input.However, there are use cases where users needed exactly this (e.g. to replace another layer) and were manually creating custom modules to do so and asked for the nn.Identity layer in the PyTorch nn backend. Since more and more users were depending on it, it was created.However, as already said, this layer might not be interesting for you.
hasattr( )
hasattr( )用于判断对象是否包含对应的属性
hasattr(object, name)
object -- 对象。
name -- 字符串,属性名。
return
如果对象有该属性返回 True,否则返回 False。class variable:x = 1y = 'a'z = Truedd = variable()
print(hasattr(dd, 'x'))
print(hasattr(dd, 'y'))
print(hasattr(dd, 'z'))
print(hasattr(dd, 'no'))True
True
True
False
代码
import torch
import torch.nn as nn
from diversebranchblock import DiverseBranchBlock
from acb import ACBlock
from dbb_transforms import transI_fusebnCONV_BN_IMPL = 'base'DEPLOY_FLAG = Falseclass ConvBN(nn.Module):def __init__(self, in_channels, out_channels, kernel_size,stride, padding, dilation, groups, deploy=False, nonlinear=None):super().__init__()# 判断线性与否if nonlinear is None:self.nonlinear = nn.Identity()else:self.nonlinear = nonlinear# 根据deploy确定创建conv还是conv-bnif deploy:self.conv = nn.Conv2d(in_channels=in_channels, out_channels=out_channels, kernel_size=kernel_size,stride=stride, padding=padding, dilation=dilation, groups=groups, bias=True)else:self.conv = nn.Conv2d(in_channels=in_channels, out_channels=out_channels, kernel_size=kernel_size,stride=stride, padding=padding, dilation=dilation, groups=groups, bias=False)self.bn = nn.BatchNorm2d(num_features=out_channels)def forward(self, x):# 判断是否包含bn,有的话就在conv后bn一下,没有的话就直接线性if hasattr(self, 'bn'):return self.nonlinear(self.bn(self.conv(x)))else:return self.nonlinear(self.conv(x))# 切换到deploydef switch_to_deploy(self):# 获取第一类转换的卷积核及偏置kernel, bias = transI_fusebn(self.conv.weight, self.bn)# 定义一个新的卷积核用于接收训练过程的权重conv = nn.Conv2d(in_channels=self.conv.in_channels, out_channels=self.conv.out_channels,kernel_size=self.conv.kernel_size,stride=self.conv.stride, padding=self.conv.padding, dilation=self.conv.dilation,groups=self.conv.groups, bias=True)# 使用第一类转换的参数更新conv的卷积核和偏置conv.weight.data = kernelconv.bias.data = biasfor para in self.parameters():para.detach_()self.__delattr__('conv')self.__delattr__('bn')self.conv = conv# conv-bn
def conv_bn(in_channels, out_channels, kernel_size, stride=1, padding=0, dilation=1, groups=1):if CONV_BN_IMPL == 'base' or kernel_size == 1 or kernel_size >= 7:blk_type = ConvBNelif CONV_BN_IMPL == 'ACB':blk_type = ACBlockelse:blk_type = DiverseBranchBlockreturn blk_type(in_channels=in_channels, out_channels=out_channels, kernel_size=kernel_size, stride=stride,padding=padding, dilation=dilation, groups=groups, deploy=DEPLOY_FLAG)# conv-bn-relu
def conv_bn_relu(in_channels, out_channels, kernel_size, stride=1, padding=0, dilation=1, groups=1):if CONV_BN_IMPL == 'base' or kernel_size == 1 or kernel_size >= 7:blk_type = ConvBNelif CONV_BN_IMPL == 'ACB':blk_type = ACBlockelse:blk_type = DiverseBranchBlockreturn blk_type(in_channels=in_channels, out_channels=out_channels, kernel_size=kernel_size, stride=stride,padding=padding, dilation=dilation, groups=groups, deploy=DEPLOY_FLAG, nonlinear=nn.ReLU())def switch_conv_bn_impl(block_type):assert block_type in ['base', 'DBB', 'ACB']global CONV_BN_IMPLCONV_BN_IMPL = block_typedef switch_deploy_flag(deploy):global DEPLOY_FLAGDEPLOY_FLAG = deployprint('deploy flag: ', DEPLOY_FLAG)def build_model(arch):if arch == 'ResNet-18':from resnet import create_Res18model = create_Res18()elif arch == 'ResNet-50':from resnet import create_Res50model = create_Res50()elif arch == 'MobileNet':from mobilenet import create_MobileNetmodel = create_MobileNet()else:raise ValueError('TODO')return modelconvert.py
补充(argparse)
argparse是python自带的命令行参数解析包,可以用来方便读取命令行参数,使用简单。
argparse基本使用方式可以分为三步骤:首先,我们使用argparse.ArgumentParser生成一个参数解释器,然后,通过实例对象的add_argument方法像对象中添加成员,最后,通过实例对象的parse_args方法获取解析的参数。
import argparsedef main():# 使用ArgumentParser类生成一个parser对象,通常成为参数解释器parser = argparse.ArgumentParser(description="Demo of argparse")# 使用add_argument方法来增加参数,-n或者--name代指相同,default表示默认请款下的参数parser.add_argument('-n', '--name', default=' Li ')parser.add_argument('-y', '--year', default='20')# parse_args方法获得解析的参数args = parser.parse_args()print(args)name = args.nameyear = args.yearprint('Hello {} {}'.format(name, year))if __name__ == '__main__':main()
补充(conv.weight.data)
conv.weight.data可以获取卷积核,在重参数化,常用于修改卷积核的权重和偏置
conv = nn.Conv2d()生成的对象,其属性conv.weight并不是一个tensor类,而是一个torch.nn.parameter.Parameter, conv.weight.data才是一个torch.Tensor类。
# 随机定义一个张量作为卷积核
kernel_data = torch.rand(1,1,3,3)
print(kernel_data )
# 定义一个卷积操作,用来接收卷积核
conv = nn.Conv2d(in_channels=1, out_channels=1, kernel_size=(3,3),stride=1, padding=1, padding_mode='zeros', bias=False)
# 显示当前conv中的卷积核
print(conv.weight.data)
# 使用kernel_data 替换conv的卷积核
conv.weight = nn.Parameter(kernel_data)
# 显示替换后的卷积核
print(conv.weight.data)
补充(delattr)
如果去对象中读取不到某属性,就会进入getattr;如果去对象中赋值或者修改某属性,就会进入setattr;如果删除对象中的属性,就会进入delattr。
class Foo:x = 1def __init__(self, y):self.y = ydef __getattr__(self, item):print('----> from getattr:你找的属性不存在')def __setattr__(self, key, value):print('----> from setattr')# self.key = value # 这就无限递归了,你好好想想# self.__dict__[key] = value # 应该使用它def __delattr__(self, item):print('----> from delattr')# del self.item # 无限递归了self.__dict__.pop(item)f1 = Foo(10)
代码
import argparse
import os
import torch
from convnet_utils import switch_conv_bn_impl, switch_deploy_flag, build_modelparser = argparse.ArgumentParser(description='DBB Conversion')
parser.add_argument('load', metavar='LOAD', help='path to the weights file')
parser.add_argument('save', metavar='SAVE', help='path to the weights file')
parser.add_argument('-a', '--arch', metavar='ARCH', default='ResNet-18')def convert():args = parser.parse_args()switch_conv_bn_impl('DBB')switch_deploy_flag(False)train_model = build_model(args.arch)if 'hdf5' in args.load:from utils import model_load_hdf5model_load_hdf5(train_model, args.load)elif os.path.isfile(args.load):print("=> loading checkpoint '{}'".format(args.load))checkpoint = torch.load(args.load)if 'state_dict' in checkpoint:checkpoint = checkpoint['state_dict']ckpt = {k.replace('module.', ''): v for k, v in checkpoint.items()} # strip the namestrain_model.load_state_dict(ckpt)else:print("=> no checkpoint found at '{}'".format(args.load))for m in train_model.modules():if hasattr(m, 'switch_to_deploy'):m.switch_to_deploy()torch.save(train_model.state_dict(), args.save)if __name__ == '__main__':convert()
dbb_verify.py
import torch
import torch.nn as nn
from diversebranchblock import DiverseBranchBlockif __name__ == '__main__':x = torch.randn(1, 32, 56, 56)for k in (3, 5):for s in (1, 2):dbb = DiverseBranchBlock(in_channels=32, out_channels=64, kernel_size=k, stride=s, padding=k//2,groups=2, deploy=False)for module in dbb.modules():if isinstance(module, torch.nn.BatchNorm2d):nn.init.uniform_(module.running_mean, 0, 0.1)nn.init.uniform_(module.running_var, 0, 0.1)nn.init.uniform_(module.weight, 0, 0.1)nn.init.uniform_(module.bias, 0, 0.1)dbb.eval()print(dbb)train_y = dbb(x)dbb.switch_to_deploy()deploy_y = dbb(x)print(dbb)print('========================== The diff is')print(((train_y - deploy_y) ** 2).sum())
diversebranchblock.py
import torch
import torch.nn as nn
import torch.nn.functional as F
from dbb_transforms import *def conv_bn(in_channels, out_channels, kernel_size, stride=1, padding=0, dilation=1, groups=1,padding_mode='zeros'):conv_layer = nn.Conv2d(in_channels=in_channels, out_channels=out_channels, kernel_size=kernel_size,stride=stride, padding=padding, dilation=dilation, groups=groups,bias=False, padding_mode=padding_mode)bn_layer = nn.BatchNorm2d(num_features=out_channels, affine=True)se = nn.Sequential()se.add_module('conv', conv_layer)se.add_module('bn', bn_layer)return seclass IdentityBasedConv1x1(nn.Conv2d):def __init__(self, channels, groups=1):super(IdentityBasedConv1x1, self).__init__(in_channels=channels, out_channels=channels, kernel_size=1, stride=1, padding=0, groups=groups, bias=False)assert channels % groups == 0input_dim = channels // groupsid_value = np.zeros((channels, input_dim, 1, 1))for i in range(channels):id_value[i, i % input_dim, 0, 0] = 1self.id_tensor = torch.from_numpy(id_value).type_as(self.weight)nn.init.zeros_(self.weight)def forward(self, input):kernel = self.weight + self.id_tensor.to(self.weight.device)result = F.conv2d(input, kernel, None, stride=1, padding=0, dilation=self.dilation, groups=self.groups)return resultdef get_actual_kernel(self):return self.weight + self.id_tensor.to(self.weight.device)class BNAndPadLayer(nn.Module):def __init__(self,pad_pixels,num_features,eps=1e-5,momentum=0.1,affine=True,track_running_stats=True):super(BNAndPadLayer, self).__init__()self.bn = nn.BatchNorm2d(num_features, eps, momentum, affine, track_running_stats)self.pad_pixels = pad_pixelsdef forward(self, input):output = self.bn(input)if self.pad_pixels > 0:if self.bn.affine:pad_values = self.bn.bias.detach() - self.bn.running_mean * self.bn.weight.detach() / torch.sqrt(self.bn.running_var + self.bn.eps)else:pad_values = - self.bn.running_mean / torch.sqrt(self.bn.running_var + self.bn.eps)output = F.pad(output, [self.pad_pixels] * 4)pad_values = pad_values.view(1, -1, 1, 1)output[:, :, 0:self.pad_pixels, :] = pad_valuesoutput[:, :, -self.pad_pixels:, :] = pad_valuesoutput[:, :, :, 0:self.pad_pixels] = pad_valuesoutput[:, :, :, -self.pad_pixels:] = pad_valuesreturn output@propertydef weight(self):return self.bn.weight@propertydef bias(self):return self.bn.bias@propertydef running_mean(self):return self.bn.running_mean@propertydef running_var(self):return self.bn.running_var@propertydef eps(self):return self.bn.epsclass DiverseBranchBlock(nn.Module):def __init__(self, in_channels, out_channels, kernel_size,stride=1, padding=0, dilation=1, groups=1,internal_channels_1x1_3x3=None,deploy=False, nonlinear=None, single_init=False):super(DiverseBranchBlock, self).__init__()self.deploy = deployif nonlinear is None:self.nonlinear = nn.Identity()else:self.nonlinear = nonlinearself.kernel_size = kernel_sizeself.out_channels = out_channelsself.groups = groupsassert padding == kernel_size // 2if deploy:self.dbb_reparam = nn.Conv2d(in_channels=in_channels, out_channels=out_channels, kernel_size=kernel_size, stride=stride,padding=padding, dilation=dilation, groups=groups, bias=True)else:self.dbb_origin = conv_bn(in_channels=in_channels, out_channels=out_channels, kernel_size=kernel_size, stride=stride, padding=padding, dilation=dilation, groups=groups)self.dbb_avg = nn.Sequential()if groups < out_channels:self.dbb_avg.add_module('conv',nn.Conv2d(in_channels=in_channels, out_channels=out_channels, kernel_size=1,stride=1, padding=0, groups=groups, bias=False))self.dbb_avg.add_module('bn', BNAndPadLayer(pad_pixels=padding, num_features=out_channels))self.dbb_avg.add_module('avg', nn.AvgPool2d(kernel_size=kernel_size, stride=stride, padding=0))self.dbb_1x1 = conv_bn(in_channels=in_channels, out_channels=out_channels, kernel_size=1, stride=stride,padding=0, groups=groups)else:self.dbb_avg.add_module('avg', nn.AvgPool2d(kernel_size=kernel_size, stride=stride, padding=padding))self.dbb_avg.add_module('avgbn', nn.BatchNorm2d(out_channels))if internal_channels_1x1_3x3 is None:internal_channels_1x1_3x3 = in_channels if groups < out_channels else 2 * in_channels # For mobilenet, it is better to have 2X internal channelsself.dbb_1x1_kxk = nn.Sequential()if internal_channels_1x1_3x3 == in_channels:self.dbb_1x1_kxk.add_module('idconv1', IdentityBasedConv1x1(channels=in_channels, groups=groups))else:self.dbb_1x1_kxk.add_module('conv1', nn.Conv2d(in_channels=in_channels, out_channels=internal_channels_1x1_3x3,kernel_size=1, stride=1, padding=0, groups=groups, bias=False))self.dbb_1x1_kxk.add_module('bn1', BNAndPadLayer(pad_pixels=padding, num_features=internal_channels_1x1_3x3, affine=True))self.dbb_1x1_kxk.add_module('conv2', nn.Conv2d(in_channels=internal_channels_1x1_3x3, out_channels=out_channels,kernel_size=kernel_size, stride=stride, padding=0, groups=groups, bias=False))self.dbb_1x1_kxk.add_module('bn2', nn.BatchNorm2d(out_channels))# The experiments reported in the paper used the default initialization of bn.weight (all as 1). But changing the initialization may be useful in some cases.if single_init:# Initialize the bn.weight of dbb_origin as 1 and others as 0. This is not the default setting.self.single_init()def get_equivalent_kernel_bias(self):k_origin, b_origin = transI_fusebn(self.dbb_origin.conv.weight, self.dbb_origin.bn)if hasattr(self, 'dbb_1x1'):k_1x1, b_1x1 = transI_fusebn(self.dbb_1x1.conv.weight, self.dbb_1x1.bn)k_1x1 = transVI_multiscale(k_1x1, self.kernel_size)else:k_1x1, b_1x1 = 0, 0if hasattr(self.dbb_1x1_kxk, 'idconv1'):k_1x1_kxk_first = self.dbb_1x1_kxk.idconv1.get_actual_kernel()else:k_1x1_kxk_first = self.dbb_1x1_kxk.conv1.weightk_1x1_kxk_first, b_1x1_kxk_first = transI_fusebn(k_1x1_kxk_first, self.dbb_1x1_kxk.bn1)k_1x1_kxk_second, b_1x1_kxk_second = transI_fusebn(self.dbb_1x1_kxk.conv2.weight, self.dbb_1x1_kxk.bn2)k_1x1_kxk_merged, b_1x1_kxk_merged = transIII_1x1_kxk(k_1x1_kxk_first, b_1x1_kxk_first, k_1x1_kxk_second, b_1x1_kxk_second, groups=self.groups)k_avg = transV_avg(self.out_channels, self.kernel_size, self.groups)k_1x1_avg_second, b_1x1_avg_second = transI_fusebn(k_avg.to(self.dbb_avg.avgbn.weight.device), self.dbb_avg.avgbn)if hasattr(self.dbb_avg, 'conv'):k_1x1_avg_first, b_1x1_avg_first = transI_fusebn(self.dbb_avg.conv.weight, self.dbb_avg.bn)k_1x1_avg_merged, b_1x1_avg_merged = transIII_1x1_kxk(k_1x1_avg_first, b_1x1_avg_first, k_1x1_avg_second, b_1x1_avg_second, groups=self.groups)else:k_1x1_avg_merged, b_1x1_avg_merged = k_1x1_avg_second, b_1x1_avg_secondreturn transII_addbranch((k_origin, k_1x1, k_1x1_kxk_merged, k_1x1_avg_merged), (b_origin, b_1x1, b_1x1_kxk_merged, b_1x1_avg_merged))def switch_to_deploy(self):if hasattr(self, 'dbb_reparam'):returnkernel, bias = self.get_equivalent_kernel_bias()self.dbb_reparam = nn.Conv2d(in_channels=self.dbb_origin.conv.in_channels, out_channels=self.dbb_origin.conv.out_channels,kernel_size=self.dbb_origin.conv.kernel_size, stride=self.dbb_origin.conv.stride,padding=self.dbb_origin.conv.padding, dilation=self.dbb_origin.conv.dilation, groups=self.dbb_origin.conv.groups, bias=True)self.dbb_reparam.weight.data = kernelself.dbb_reparam.bias.data = biasfor para in self.parameters():para.detach_()self.__delattr__('dbb_origin')self.__delattr__('dbb_avg')if hasattr(self, 'dbb_1x1'):self.__delattr__('dbb_1x1')self.__delattr__('dbb_1x1_kxk')def forward(self, inputs):if hasattr(self, 'dbb_reparam'):return self.nonlinear(self.dbb_reparam(inputs))out = self.dbb_origin(inputs)if hasattr(self, 'dbb_1x1'):out += self.dbb_1x1(inputs)out += self.dbb_avg(inputs)out += self.dbb_1x1_kxk(inputs)return self.nonlinear(out)def init_gamma(self, gamma_value):if hasattr(self, "dbb_origin"):torch.nn.init.constant_(self.dbb_origin.bn.weight, gamma_value)if hasattr(self, "dbb_1x1"):torch.nn.init.constant_(self.dbb_1x1.bn.weight, gamma_value)if hasattr(self, "dbb_avg"):torch.nn.init.constant_(self.dbb_avg.avgbn.weight, gamma_value)if hasattr(self, "dbb_1x1_kxk"):torch.nn.init.constant_(self.dbb_1x1_kxk.bn2.weight, gamma_value)def single_init(self):self.init_gamma(0.0)if hasattr(self, "dbb_origin"):torch.nn.init.constant_(self.dbb_origin.bn.weight, 1.0)moblienet.py
import torch.nn as nn
import torch.nn.functional as F
from convnet_utils import conv_bn_relu
MOBILE_CHANNELS = [32,32, 64,64, 128,128, 128,128, 256,256, 256,256, 512,512, 512, 512, 512, 512, 512, 512, 512, 512, 512,512, 1024,1024, 1024]class MobileV1Block(nn.Module):'''Depthwise conv + Pointwise conv'''def __init__(self, in_planes, out_planes, stride=1):super(MobileV1Block, self).__init__()self.depthwise = conv_bn_relu(in_channels=in_planes, out_channels=in_planes, kernel_size=3,stride=stride, padding=1, groups=in_planes)self.pointwise = conv_bn_relu(in_channels=in_planes, out_channels=out_planes, kernel_size=1,stride=1, padding=0)def forward(self, x):out = self.depthwise(x)out = self.pointwise(out)return outclass MobileV1(nn.Module):def __init__(self, num_classes):super(MobileV1, self).__init__()channels = MOBILE_CHANNELSassert len(channels) == 27self.conv1 = conv_bn_relu(in_channels=3, out_channels=channels[0], kernel_size=3, stride=2, padding=1)blocks = []for block_idx in range(13):depthwise_channels = int(channels[block_idx * 2 + 1])pointwise_channels = int(channels[block_idx * 2 + 2])stride = 2 if block_idx in [1, 3, 5, 11] else 1blocks.append(MobileV1Block(in_planes=depthwise_channels, out_planes=pointwise_channels, stride=stride))self.stem = nn.Sequential(*blocks)self.gap = nn.AdaptiveAvgPool2d(output_size=1)self.linear = nn.Linear(channels[-1], num_classes)def forward(self, x):out = self.conv1(x)out = self.stem(out)out = self.gap(out)out = out.view(out.size(0), -1)out = self.linear(out)return outdef create_MobileNet():return MobileV1(num_classes=1000)
resnet.py
import torch.nn as nn
import torch.nn.functional as F
from convnet_utils import conv_bn, conv_bn_reluclass BasicBlock(nn.Module):expansion = 1def __init__(self, in_planes, planes, stride=1):super(BasicBlock, self).__init__()if stride != 1 or in_planes != self.expansion * planes:self.shortcut = conv_bn(in_channels=in_planes, out_channels=self.expansion * planes, kernel_size=1, stride=stride)else:self.shortcut = nn.Identity()self.conv1 = conv_bn_relu(in_channels=in_planes, out_channels=planes, kernel_size=3, stride=stride, padding=1)self.conv2 = conv_bn(in_channels=planes, out_channels=self.expansion * planes, kernel_size=3, stride=1, padding=1)def forward(self, x):out = self.conv1(x)out = self.conv2(out)out = out + self.shortcut(x)out = F.relu(out)return outclass Bottleneck(nn.Module):expansion = 4def __init__(self, in_planes, planes, stride=1):super(Bottleneck, self).__init__()if stride != 1 or in_planes != self.expansion*planes:self.shortcut = conv_bn(in_planes, self.expansion*planes, kernel_size=1, stride=stride)else:self.shortcut = nn.Identity()self.conv1 = conv_bn_relu(in_planes, planes, kernel_size=1)self.conv2 = conv_bn_relu(planes, planes, kernel_size=3, stride=stride, padding=1)self.conv3 = conv_bn(planes, self.expansion*planes, kernel_size=1)def forward(self, x):out = self.conv1(x)out = self.conv2(out)out = self.conv3(out)out += self.shortcut(x)out = F.relu(out)return outclass ResNet(nn.Module):def __init__(self, block, num_blocks, num_classes=1000, width_multiplier=1):super(ResNet, self).__init__()self.in_planes = int(64 * width_multiplier)self.stage0 = nn.Sequential()self.stage0.add_module('conv1', conv_bn_relu(in_channels=3, out_channels=self.in_planes, kernel_size=7, stride=2, padding=3))self.stage0.add_module('maxpool', nn.MaxPool2d(kernel_size=3, stride=2, padding=1))self.stage1 = self._make_stage(block, int(64 * width_multiplier), num_blocks[0], stride=1)self.stage2 = self._make_stage(block, int(128 * width_multiplier), num_blocks[1], stride=2)self.stage3 = self._make_stage(block, int(256 * width_multiplier), num_blocks[2], stride=2)self.stage4 = self._make_stage(block, int(512 * width_multiplier), num_blocks[3], stride=2)self.gap = nn.AdaptiveAvgPool2d(output_size=1)self.linear = nn.Linear(int(512*block.expansion*width_multiplier), num_classes)def _make_stage(self, block, planes, num_blocks, stride):strides = [stride] + [1]*(num_blocks-1)blocks = []for stride in strides:if block is Bottleneck:blocks.append(block(in_planes=self.in_planes, planes=int(planes), stride=stride))else:blocks.append(block(in_planes=self.in_planes, planes=int(planes), stride=stride))self.in_planes = int(planes * block.expansion)return nn.Sequential(*blocks)def forward(self, x):out = self.stage0(x)out = self.stage1(out)out = self.stage2(out)out = self.stage3(out)out = self.stage4(out)out = self.gap(out)out = out.view(out.size(0), -1)out = self.linear(out)return outdef create_Res18():return ResNet(BasicBlock, [2,2,2,2], num_classes=1000, width_multiplier=1)def create_Res50():return ResNet(Bottleneck, [3,4,6,3], num_classes=1000, width_multiplier=1)
test.py
import argparse
import os
import time
import torch
import torch.backends.cudnn as cudnn
import torchvision.datasets as datasets
from utils import accuracy, ProgressMeter, AverageMeter, val_preprocess
from convnet_utils import switch_deploy_flag, switch_conv_bn_impl, build_modelparser = argparse.ArgumentParser(description='PyTorch ImageNet Test')
parser.add_argument('data', metavar='DIR', help='path to dataset')
parser.add_argument('mode', metavar='MODE', default='train', choices=['train', 'deploy'], help='train or deploy')
parser.add_argument('weights', metavar='WEIGHTS', help='path to the weights file')
parser.add_argument('-a', '--arch', metavar='ARCH', default='ResNet-18')
parser.add_argument('-t', '--blocktype', metavar='BLK', default='DBB', choices=['DBB', 'ACB', 'base'])
parser.add_argument('-j', '--workers', default=4, type=int, metavar='N',help='number of data loading workers (default: 4)')
parser.add_argument('-b', '--batch-size', default=100, type=int,metavar='N',help='mini-batch size (default: 100) for test')def test():args = parser.parse_args()switch_deploy_flag(args.mode == 'deploy')switch_conv_bn_impl(args.blocktype)model = build_model(args.arch)if not torch.cuda.is_available():print('using CPU, this will be slow')use_gpu = Falseelse:model = model.cuda()use_gpu = True# define loss function (criterion) and optimizercriterion = torch.nn.CrossEntropyLoss().cuda()if 'hdf5' in args.weights:from utils import model_load_hdf5model_load_hdf5(model, args.weights)elif os.path.isfile(args.weights):print("=> loading checkpoint '{}'".format(args.weights))checkpoint = torch.load(args.weights)if 'state_dict' in checkpoint:checkpoint = checkpoint['state_dict']ckpt = {k.replace('module.', ''):v for k,v in checkpoint.items()} # strip the namesmodel.load_state_dict(ckpt)else:print("=> no checkpoint found at '{}'".format(args.weights))cudnn.benchmark = True# Data loading codevaldir = os.path.join(args.data, 'val')val_loader = torch.utils.data.DataLoader(datasets.ImageFolder(valdir, val_preprocess(224)),batch_size=args.batch_size, shuffle=False,num_workers=args.workers, pin_memory=True)validate(val_loader, model, criterion, use_gpu)def validate(val_loader, model, criterion, use_gpu):batch_time = AverageMeter('Time', ':6.3f')losses = AverageMeter('Loss', ':.4e')top1 = AverageMeter('Acc@1', ':6.2f')top5 = AverageMeter('Acc@5', ':6.2f')progress = ProgressMeter(len(val_loader),[batch_time, losses, top1, top5],prefix='Test: ')# switch to evaluate modemodel.eval()with torch.no_grad():end = time.time()for i, (images, target) in enumerate(val_loader):if use_gpu:images = images.cuda(non_blocking=True)target = target.cuda(non_blocking=True)# compute outputoutput = model(images)loss = criterion(output, target)# measure accuracy and record lossacc1, acc5 = accuracy(output, target, topk=(1, 5))losses.update(loss.item(), images.size(0))top1.update(acc1[0], images.size(0))top5.update(acc5[0], images.size(0))# measure elapsed timebatch_time.update(time.time() - end)end = time.time()if i % 10 == 0:progress.display(i)print(' * Acc@1 {top1.avg:.3f} Acc@5 {top5.avg:.3f}'.format(top1=top1, top5=top5))return top1.avgif __name__ == '__main__':test()
train.py
import argparse
import os
import random
import shutil
import time
import warningsimport torch
import torch.nn as nn
import torch.nn.parallel
import torch.backends.cudnn as cudnn
import torch.distributed as dist
import torch.optim
import torch.multiprocessing as mp
import torch.utils.data
import torch.utils.data.distributed
import torchvision.transforms as transforms
import torchvision.datasets as datasets
from torch.optim.lr_scheduler import CosineAnnealingLR
from utils import AverageMeter, accuracy, ProgressMeter, val_preprocess, strong_train_preprocess, standard_train_preprocessIMAGENET_TRAINSET_SIZE = 1281167parser = argparse.ArgumentParser(description='PyTorch ImageNet Training')
parser.add_argument('data', metavar='DIR',help='path to dataset')parser.add_argument('-a', '--arch', metavar='ARCH', default='ResNet-18')
parser.add_argument('-t', '--blocktype', metavar='BLK', default='DBB', choices=['DBB', 'ACB', 'base'])parser.add_argument('-j', '--workers', default=8, type=int, metavar='N',help='number of data loading workers (default: 4)')
parser.add_argument('--epochs', default=120, type=int, metavar='N',help='number of total epochs to run')
parser.add_argument('--start-epoch', default=0, type=int, metavar='N',help='manual epoch number (useful on restarts)')
parser.add_argument('-b', '--batch-size', default=256, type=int,metavar='N',help='mini-batch size (default: 256), this is the total ''batch size of all GPUs on the current node when ''using Data Parallel or Distributed Data Parallel')
parser.add_argument('--lr', '--learning-rate', default=0.1, type=float,metavar='LR', help='initial learning rate', dest='lr')
parser.add_argument('--momentum', default=0.9, type=float, metavar='M',help='momentum')
parser.add_argument('--wd', '--weight-decay', default=1e-4, type=float,metavar='W', help='weight decay (default: 1e-4)',dest='weight_decay')
parser.add_argument('-p', '--print-freq', default=10, type=int,metavar='N', help='print frequency (default: 10)')
parser.add_argument('--resume', default='', type=str, metavar='PATH',help='path to latest checkpoint (default: none)')
parser.add_argument('-e', '--evaluate', dest='evaluate', action='store_true',help='evaluate model on validation set')
parser.add_argument('--pretrained', dest='pretrained', action='store_true',help='use pre-trained model')
parser.add_argument('--world-size', default=-1, type=int,help='number of nodes for distributed training')
parser.add_argument('--rank', default=-1, type=int,help='node rank for distributed training')
parser.add_argument('--dist-url', default='tcp://224.66.41.62:23456', type=str,help='url used to set up distributed training')
parser.add_argument('--dist-backend', default='nccl', type=str,help='distributed backend')
parser.add_argument('--seed', default=None, type=int,help='seed for initializing training. ')
parser.add_argument('--gpu', default=None, type=int,help='GPU id to use.')
parser.add_argument('--multiprocessing-distributed', action='store_true',help='Use multi-processing distributed training to launch ''N processes per node, which has N GPUs. This is the ''fastest way to use PyTorch for either single node or ''multi node data parallel training')best_acc1 = 0def sgd_optimizer(model, lr, momentum, weight_decay):params = []for key, value in model.named_parameters():if not value.requires_grad:continueapply_lr = lrapply_wd = weight_decayif 'bias' in key:apply_lr = 2 * lr # Just a Caffe-style common practice. Made no difference.if 'depth' in key:apply_wd = 0print('set weight decay ', key, apply_wd)params += [{'params': [value], 'lr': apply_lr, 'weight_decay': apply_wd}]optimizer = torch.optim.SGD(params, lr, momentum=momentum)return optimizerdef main():args = parser.parse_args()if args.seed is not None:random.seed(args.seed)torch.manual_seed(args.seed)cudnn.deterministic = Truewarnings.warn('You have chosen to seed training. ''This will turn on the CUDNN deterministic setting, ''which can slow down your training considerably! ''You may see unexpected behavior when restarting ''from checkpoints.')if args.gpu is not None:warnings.warn('You have chosen a specific GPU. This will completely ''disable data parallelism.')if args.dist_url == "env://" and args.world_size == -1:args.world_size = int(os.environ["WORLD_SIZE"])args.distributed = args.world_size > 1 or args.multiprocessing_distributedngpus_per_node = torch.cuda.device_count()if args.multiprocessing_distributed:# Since we have ngpus_per_node processes per node, the total world_size# needs to be adjusted accordinglyargs.world_size = ngpus_per_node * args.world_size# Use torch.multiprocessing.spawn to launch distributed processes: the# main_worker process functionmp.spawn(main_worker, nprocs=ngpus_per_node, args=(ngpus_per_node, args))else:# Simply call main_worker functionmain_worker(args.gpu, ngpus_per_node, args)def main_worker(gpu, ngpus_per_node, args):global best_acc1args.gpu = gpuif args.gpu is not None:print("Use GPU: {} for training".format(args.gpu))if args.distributed:if args.dist_url == "env://" and args.rank == -1:args.rank = int(os.environ["RANK"])if args.multiprocessing_distributed:# For multiprocessing distributed training, rank needs to be the# global rank among all the processesargs.rank = args.rank * ngpus_per_node + gpudist.init_process_group(backend=args.dist_backend, init_method=args.dist_url,world_size=args.world_size, rank=args.rank)# =========================== build modelfrom convnet_utils import switch_deploy_flag, switch_conv_bn_impl, build_modelswitch_deploy_flag(False)switch_conv_bn_impl(args.blocktype)model = build_model(args.arch)if gpu == 0:for name, param in model.named_parameters():print(name, param.size())if not torch.cuda.is_available():print('using CPU, this will be slow')elif args.distributed:# For multiprocessing distributed, DistributedDataParallel constructor# should always set the single device scope, otherwise,# DistributedDataParallel will use all available devices.if args.gpu is not None:torch.cuda.set_device(args.gpu)model.cuda(args.gpu)# When using a single GPU per process and per# DistributedDataParallel, we need to divide the batch size# ourselves based on the total number of GPUs we haveargs.batch_size = int(args.batch_size / ngpus_per_node)args.workers = int((args.workers + ngpus_per_node - 1) / ngpus_per_node)model = torch.nn.parallel.DistributedDataParallel(model, device_ids=[args.gpu], broadcast_buffers=False)else:model.cuda()# DistributedDataParallel will divide and allocate batch_size to all# available GPUs if device_ids are not setmodel = torch.nn.parallel.DistributedDataParallel(model, broadcast_buffers=False)elif args.gpu is not None:torch.cuda.set_device(args.gpu)model = model.cuda(args.gpu)else:# DataParallel will divide and allocate batch_size to all available GPUsmodel = torch.nn.DataParallel(model).cuda()# define loss function (criterion) and optimizercriterion = nn.CrossEntropyLoss().cuda(args.gpu)optimizer = sgd_optimizer(model, args.lr, args.momentum, args.weight_decay)lr_scheduler = CosineAnnealingLR(optimizer=optimizer, T_max=args.epochs * IMAGENET_TRAINSET_SIZE // args.batch_size // ngpus_per_node)# optionally resume from a checkpointif args.resume:if os.path.isfile(args.resume):print("=> loading checkpoint '{}'".format(args.resume))if args.gpu is None:checkpoint = torch.load(args.resume)else:# Map model to be loaded to specified single gpu.loc = 'cuda:{}'.format(args.gpu)checkpoint = torch.load(args.resume, map_location=loc)args.start_epoch = checkpoint['epoch']best_acc1 = checkpoint['best_acc1']if args.gpu is not None:# best_acc1 may be from a checkpoint from a different GPUbest_acc1 = best_acc1.to(args.gpu)model.load_state_dict(checkpoint['state_dict'])optimizer.load_state_dict(checkpoint['optimizer'])lr_scheduler.load_state_dict(checkpoint['scheduler'])print("=> loaded checkpoint '{}' (epoch {})".format(args.resume, checkpoint['epoch']))else:print("=> no checkpoint found at '{}'".format(args.resume))cudnn.benchmark = True# Data loading codetraindir = os.path.join(args.data, 'train')valdir = os.path.join(args.data, 'val')trans = strong_train_preprocess(224) if 'ResNet' in args.arch else standard_train_preprocess(224)print('aug is ', trans)train_dataset = datasets.ImageFolder(traindir, trans)if args.distributed:train_sampler = torch.utils.data.distributed.DistributedSampler(train_dataset, shuffle=True)else:train_sampler = Nonetrain_loader = torch.utils.data.DataLoader(train_dataset, batch_size=args.batch_size, shuffle=(train_sampler is None),num_workers=args.workers, pin_memory=True, sampler=train_sampler, drop_last=True)val_dataset = datasets.ImageFolder(valdir, val_preprocess(224))val_loader = torch.utils.data.DataLoader(val_dataset,batch_size=args.batch_size, shuffle=False,num_workers=args.workers, pin_memory=True)if args.evaluate:validate(val_loader, model, criterion, args)returnfor epoch in range(args.start_epoch, args.epochs):if args.distributed:train_sampler.set_epoch(epoch)print('set sampler')# adjust_learning_rate(optimizer, epoch, args)# train for one epochtrain(train_loader, model, criterion, optimizer, epoch, args, lr_scheduler)# evaluate on validation setacc1 = validate(val_loader, model, criterion, args)# remember best acc@1 and save checkpointis_best = acc1 > best_acc1best_acc1 = max(acc1, best_acc1)if not args.multiprocessing_distributed or (args.multiprocessing_distributedand args.rank % ngpus_per_node == 0):save_checkpoint({'epoch': epoch + 1,'arch': args.arch,'state_dict': model.state_dict(),'best_acc1': best_acc1,'optimizer' : optimizer.state_dict(),'scheduler': lr_scheduler.state_dict(),}, is_best, filename='{}_{}.pth.tar'.format(args.arch, args.blocktype))def train(train_loader, model, criterion, optimizer, epoch, args, lr_scheduler):batch_time = AverageMeter('Time', ':6.3f')data_time = AverageMeter('Data', ':6.3f')losses = AverageMeter('Loss', ':.4e')top1 = AverageMeter('Acc@1', ':6.2f')top5 = AverageMeter('Acc@5', ':6.2f')progress = ProgressMeter(len(train_loader),[batch_time, data_time, losses, top1, top5, ],prefix="Epoch: [{}]".format(epoch))# switch to train modemodel.train()end = time.time()for i, (images, target) in enumerate(train_loader):# measure data loading timedata_time.update(time.time() - end)if args.gpu is not None:images = images.cuda(args.gpu, non_blocking=True)if torch.cuda.is_available():target = target.cuda(args.gpu, non_blocking=True)# compute outputoutput = model(images)loss = criterion(output, target)# measure accuracy and record lossacc1, acc5 = accuracy(output, target, topk=(1, 5))losses.update(loss.item(), images.size(0))top1.update(acc1[0], images.size(0))top5.update(acc5[0], images.size(0))# compute gradient and do SGD stepoptimizer.zero_grad()loss.backward()optimizer.step()# measure elapsed timebatch_time.update(time.time() - end)end = time.time()lr_scheduler.step()if i % args.print_freq == 0 and args.gpu == 0:progress.display(i)if i % 1000 == 0 and args.gpu == 0:print('cur lr: ', lr_scheduler.get_lr()[0])def validate(val_loader, model, criterion, args):batch_time = AverageMeter('Time', ':6.3f')losses = AverageMeter('Loss', ':.4e')top1 = AverageMeter('Acc@1', ':6.2f')top5 = AverageMeter('Acc@5', ':6.2f')progress = ProgressMeter(len(val_loader),[batch_time, losses, top1, top5],prefix='Test: ')# switch to evaluate modemodel.eval()with torch.no_grad():end = time.time()for i, (images, target) in enumerate(val_loader):if args.gpu is not None:images = images.cuda(args.gpu, non_blocking=True)if torch.cuda.is_available():target = target.cuda(args.gpu, non_blocking=True)# compute outputoutput = model(images)loss = criterion(output, target)# measure accuracy and record lossacc1, acc5 = accuracy(output, target, topk=(1, 5))losses.update(loss.item(), images.size(0))top1.update(acc1[0], images.size(0))top5.update(acc5[0], images.size(0))# measure elapsed timebatch_time.update(time.time() - end)end = time.time()if i % args.print_freq == 0:progress.display(i)# TODO: this should also be done with the ProgressMeterprint(' * Acc@1 {top1.avg:.3f} Acc@5 {top5.avg:.3f}'.format(top1=top1, top5=top5))return top1.avgdef save_checkpoint(state, is_best, filename='checkpoint.pth.tar'):torch.save(state, filename)if is_best:shutil.copyfile(filename, filename.replace('.pth.tar', '_best.pth.tar'))if __name__ == '__main__':main()utils.py
import torch
import torchvision.transforms as transformsnormalize = transforms.Normalize(mean=[0.485, 0.456, 0.406],std=[0.229, 0.224, 0.225])class PCALighting(object):"""Lighting noise(AlexNet - style PCA - based noise)"""def __init__(self, alphastd, eigval, eigvec):self.alphastd = alphastdself.eigval = eigvalself.eigvec = eigvecdef __call__(self, img):if self.alphastd == 0:return imgalpha = img.new().resize_(3).normal_(0, self.alphastd)rgb = self.eigvec.type_as(img).clone()\.mul(alpha.view(1, 3).expand(3, 3))\.mul(self.eigval.view(1, 3).expand(3, 3))\.sum(1).squeeze()return img.add(rgb.view(3, 1, 1).expand_as(img))imagenet_pca = {'eigval': torch.Tensor([0.2175, 0.0188, 0.0045]),'eigvec': torch.Tensor([[-0.5675, 0.7192, 0.4009],[-0.5808, -0.0045, -0.8140],[-0.5836, -0.6948, 0.4203],])
}def strong_train_preprocess(img_size):trans = transforms.Compose([transforms.RandomResizedCrop(img_size),transforms.RandomHorizontalFlip(),transforms.ColorJitter(brightness=0.4, saturation=0.4, hue=0.4),transforms.ToTensor(),PCALighting(0.1, imagenet_pca['eigval'], imagenet_pca['eigvec']),normalize,])print('---------------------- strong dataaug!')return transdef standard_train_preprocess(img_size):trans = transforms.Compose([transforms.RandomResizedCrop(img_size),transforms.RandomHorizontalFlip(),transforms.ToTensor(),normalize,])print('---------------------- weak dataaug!')return transdef val_preprocess(img_size):trans = transforms.Compose([transforms.Resize(256),transforms.CenterCrop(img_size),transforms.ToTensor(),normalize,])return transclass AverageMeter(object):"""Computes and stores the average and current value"""def __init__(self, name, fmt=':f'):self.name = nameself.fmt = fmtself.reset()def reset(self):self.val = 0self.avg = 0self.sum = 0self.count = 0def update(self, val, n=1):self.val = valself.sum += val * nself.count += nself.avg = self.sum / self.countdef __str__(self):fmtstr = '{name} {val' + self.fmt + '} ({avg' + self.fmt + '})'return fmtstr.format(**self.__dict__)class ProgressMeter(object):def __init__(self, num_batches, meters, prefix=""):self.batch_fmtstr = self._get_batch_fmtstr(num_batches)self.meters = metersself.prefix = prefixdef display(self, batch):entries = [self.prefix + self.batch_fmtstr.format(batch)]entries += [str(meter) for meter in self.meters]print('\t'.join(entries))def _get_batch_fmtstr(self, num_batches):num_digits = len(str(num_batches // 1))fmt = '{:' + str(num_digits) + 'd}'return '[' + fmt + '/' + fmt.format(num_batches) + ']'def accuracy(output, target, topk=(1,)):"""Computes the accuracy over the k top predictions for the specified values of k"""with torch.no_grad():maxk = max(topk)batch_size = target.size(0)_, pred = output.topk(maxk, 1, True, True)pred = pred.t()correct = pred.eq(target.view(1, -1).expand_as(pred))res = []for k in topk:correct_k = correct[:k].reshape(-1).float().sum(0, keepdim=True)res.append(correct_k.mul_(100.0 / batch_size))return resdef read_hdf5(file_path):import h5pyimport numpy as npresult = {}with h5py.File(file_path, 'r') as f:for k in f.keys():value = np.asarray(f[k])result[str(k).replace('+', '/')] = valueprint('read {} arrays from {}'.format(len(result), file_path))f.close()return resultdef model_load_hdf5(model:torch.nn.Module, hdf5_path, ignore_keys='stage0.'):weights_dict = read_hdf5(hdf5_path)for name, param in model.named_parameters():print('load param: ', name, param.size())if name in weights_dict:np_value = weights_dict[name]else:np_value = weights_dict[name.replace(ignore_keys, '')]value = torch.from_numpy(np_value).float()assert tuple(value.size()) == tuple(param.size())param.data = valuefor name, param in model.named_buffers():print('load buffer: ', name, param.size())if name in weights_dict:np_value = weights_dict[name]else:np_value = weights_dict[name.replace(ignore_keys, '')]value = torch.from_numpy(np_value).float()assert tuple(value.size()) == tuple(param.size())param.data = value