
分析linux内核qspi驱动层次
创始人
2024-03-29 12:22:58
【推荐阅读】
需要多久才能看完linux内核源码?
概述Linux内核驱动之GPIO子系统API接口
https://mp.csdn.net/mp_blog/creation/editor/127819883
一篇长文叙述Linux内核虚拟地址空间的基本概括
纯干货,linux内存管理——内存管理架构(建议收藏)
linux qspi驱动是为了解决spi驱动异步操作的冲突问题,引入了"队列化"的概念。其基本的原理是把具体需要传输的message放入到队列中,启动一个内核线
程检测队列中是否有在等待的message,如果有则启动具体的传输。
1 相关结构体:
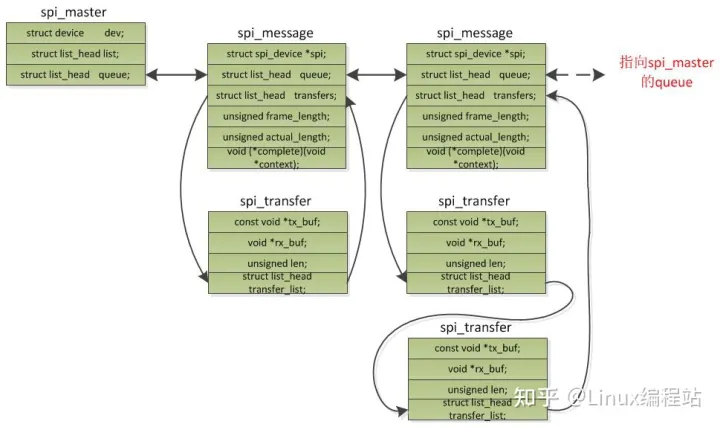
一个SPI控制器对应一个spi_master结构体,通过它和挂在对应控制器下面的flash进行通信。每一次传输由spi_message来表示,spi_message挂入到spi_master
queue队列中,spi_message又由多个传输片段spi_transfer构成。
struct spi_master{struct device dev; // 控制器本身对应的设备struct list_head list; // 通过这个插槽把spi_master链入全局的spi_master_list,一个芯片内部可以有多个SPI控制器s16 bus_num; // 用于识别一个spi控制器,一个SOC或板子可以有多个spi控制器// 该控制器对应的SPI总线编号(由0开始)/* chipselects will be integral to many controllers; some others* might use board-specific GPIOs.*/u16 num_chipselect; // 该spi控制器支持多少个从芯片u16 dma_alignment;/* spi_device.mode flags understood by this controller driver */u16 mode_bits; // 工作模式/* bitmask of supported bits_per_word for transfers */u32 bits_per_word_mask;/* limits on transfer speed */u32 min_speed_hz;u32 max_speed_hz;/* other constraints relevant to this driver */u16 flags;/* lock and mutex for SPI bus locking */spinlock_t bus_lock_spinlock;struct mutex bus_lock_mutex;/* flag indicating that the SPI bus is locked for exclusive use */bool bus_lock_flag;/* Setup mode and clock, etc (spi driver may call many times).** IMPORTANT: this may be called when transfers to another* device are active. DO NOT UPDATE SHARED REGISTERS in ways* which could break those transfers.*/int (*setup)(struct spi_device *spi); // 设置spi控制器的参数/* 把message加入队列中,master的主要工作就是处理消息队列。选中一个芯片* 把数据传出去*/int (*transfer)(struct spi_device *spi,struct spi_message *mesg);/* 释放master的回调函数 */void (*cleanup)(struct spi_device *spi);bool queued;struct kthread_worker kworker; // struct task_struct *kworker_task; // 具体的内核线程,用于处理kworker下面的每个workstruct kthread_work pump_messages; spinlock_t queue_lock;struct list_head queue; // 等待传输的消息队列struct spi_message *cur_msg; // 当前正在处理的消息bool cur_msg_mapped;struct completion xfer_completion;size_t max_dma_len;/* 用于准备硬件资源 */int (*prepare_transfer_hardware)(struct spi_master *master);/* 每个消息的原子传送回调函数 */int (*transfer_one_message)(struct spi_master *master,struct spi_message *mesg);int (*prepare_message)(struct spi_master *master,struct spi_message *message);/** These hooks are for drivers that use a generic implementation* of transfer_one_message() provied by the core.*/void (*set_cs)(struct spi_device *spi, bool enable);int (*transfer_one)(struct spi_master *master, struct spi_device *spi,struct spi_transfer *transfer);void (*handle_err)(struct spi_master *master,struct spi_message *message);/* gpio chip select */int *cs_gpios;
}struct spi_message { /* 一个多段的传输结构 */struct list_head transfers; // 具体的传输片段struct spi_device *spi; /* 这个传输放入具体设备的队列 */unsigned is_dma_mapped:1;/* completion is reported through a callback */void (*complete)(void *context); // 当所有的transfers传输完了以后会被调用到void *context;unsigned frame_length; // 所有片段的传输总数据unsigned actual_length; // 已经传输的数据int status;struct list_head queue; /* 通过该字段把本结构体挂入到对应的master的queue中 */void *state;
};struct spi_transfer { /* 最小的传输单元 */const void *tx_buf;void *rx_buf;unsigned len; // rx tx buf字节总数dma_addr_t tx_dma;dma_addr_t rx_dma;struct sg_table tx_sg;struct sg_table rx_sg;unsigned cs_change:1;unsigned tx_nbits:3;unsigned rx_nbits:3;u8 bits_per_word; // 0 默认 非0 u16 delay_usecs;u32 speed_hz;struct list_head transfer_list; // 通过这个挂入到 spi_message中
};【文章福利】小编推荐自己的Linux内核技术交流群:【977878001】整理一些个人觉得比较好得学习书籍、视频资料共享在群文件里面,有需要的可以自行添加哦!!!前100进群领取,额外赠送一份价值699的内核资料包(含视频教程、电子书、实战项目及代码)
内核资料直通车:Linux内核源码技术学习路线+视频教程代码资料
学习直通车:Linux内核源码/内存调优/文件系统/进程管理/设备驱动/网络协议
画出spi_master结构体和spi_message以及spi_transfer结构体的关系如图1所示:
2 驱动层次
static struct platform_driver zynqmp_qspi_driver = { /* 平台驱动 */.probe = zynqmp_qspi_probe,.remove = zynqmp_qspi_remove,.driver = { /* struct device_driver driver; */.name = "zynqmp-qspi",.of_match_table = zynqmp_qspi_of_match,.pm = &zynqmp_qspi_dev_pm_ops,},
};
struct bus_type platform_bus_type = { /* 平台总线类型 */.name = "platform",.dev_groups = platform_dev_groups,.match = platform_match,.uevent = platform_uevent,.pm = &platform_dev_pm_ops,
};/* 注册平台驱动 */
__platform_driver_register(struct platform_driver *drv, struct module *owner) // drivers/base/platform.cdrv->driver.bus = &platform_bus_type; // 注意是平台总线drv->driver.probe = platform_drv_probe; // 平台驱动探测函数driver_register(&drv->driver) // 注册驱动driver_find(drv->name, drv->bus); // .name = "zynqmp-qspi", &platform_bus_type; 看是否已经注册过了同名的驱动ret = bus_add_driver(drv);driver_attach(struct device_driver *drv)bus_for_each_dev(drv->bus, NULL, drv, __driver_attach); /* 通过bus设备下面的设备列表进行匹配 */__driver_attach(struct device *dev, void *data) // data = device_driverstruct device_driver *drv = data;driver_match_device(drv, dev) // 匹配上了才会往下走!!!!!!!!!!!!!否则直接去匹配下一个可能的设备return drv->bus->match ? drv->bus->match(dev, drv) : 1 /* 调用bus下面的match函数, 既platform_match函数,主要通过platform_driver下面的id_table以及名字匹配*//* 至此已经找到了设备 */ if (!dev->driver) // 还未绑定驱动,调用probe函数把驱动和设备绑定到一起driver_probe_device(drv, dev);really_probe(dev, drv);if (dev->bus->probe) {ret = dev->bus->probe(dev); // 未设置, 为空} else if (drv->probe) {ret = drv->probe(dev); // 走这个分支,为之前设置的platform_drv_probe}platform_drv_probe(struct device *_dev)struct platform_driver *drv = to_platform_driver(_dev->driver); // 获取宿主结构体 platform_driver zynqmp_qspi_driverret = drv->probe(dev); // 调用zynqmp_qspi_probe函数zynqmp_qspi_probe // 实际上是匹配控制器对应的设备struct spi_master *master;struct device *dev = &pdev->dev;master = spi_alloc_master(&pdev->dev, sizeof(*xqspi)); // 分配master空间,设置num_chipselect bus_nummaster->dev.of_node = pdev->dev.of_node; // 应该是dtb里面的spi控制器对应的节点???设置时钟,使能时钟 以及控制器zynqmp_qspi_init_hw(xqspi); 获取终端资源设置master的变量setup set_cs transfer_one prepare_transfer_hardware unprepare_transfer_hardware max_speed_hz bits_per_word_mask mode_bitsspi_register_master(master); // 注册master设置num_chipselect bus_numINIT_LIST_HEAD(&master->queue); /* 初始化master下面的message队列 */spin_lock_init(&master->queue_lock);dev_set_name(&master->dev, "spi%u", master->bus_num);status = device_add(&master->dev); // 把设备加入到系统中,平台总线上??spi_master_initialize_queue(master); // 初始化队列master->transfer = spi_queued_transfer;master->transfer_one_message = spi_transfer_one_message;ret = spi_init_queue(master); /* 初始化和启动工作队列 *//* 启动一个内核线程,该线程工作对象为工作队列master->kworker,工作函数为kthread_worker_fn,后面会介绍 */master->kworker_task = kthread_run(kthread_worker_fn, &master->kworker, "%s", dev_name(&master->dev));/* 初始化工作实例master->pump_messages, 其回调的函数为spi_pump_messages */init_kthread_work(&master->pump_messages, spi_pump_messages);master->queued = true;ret = spi_start_queue(master);/* 把工作实例master->pump_messages挂入到工作队列master->kworker中 */queue_kthread_work(&master->kworker, &master->pump_messages);list_add_tail(&master->list, &spi_master_list); // 把master挂入总的链表spi_master_listof_register_spi_devices(master); // 注册spi控制器设备下面的子设备,这个时候才开始设置spi设备下面的flash芯片for_each_available_child_of_node(master->dev.of_node, nc) {spi = of_register_spi_device(master, nc);struct spi_device *spi = spi_alloc_device(master);spi->master = master; // 将flash设备和master控制器连接到一起spi->dev.parent = &master->dev; // 父设备为spi控制器spi->dev.bus = &spi_bus_type; // 明确挂入到了spi_bus下面of_modalias_node(nc, spi->modalias, sizeof(spi->modalias)); // 通过dtb里面的compatible获取驱动rc = of_property_read_u32(nc, "reg", &value); // 通过dtb里面的reg条目获取设备的地址,既对应的片选片选spi->chip_select = value; // 选中或者不选中对应的芯片//获取 spi-rx-bus-width spi-tx-bus-width spi-max-frequency 等芯片级的信息并且设置of_property_read_u32(nc, "spi-max-frequency", &value);spi->max_speed_hz = value;rc = spi_add_device(spi); // 注册spi设备bus_for_each_dev(&spi_bus_type, NULL, spi, spi_dev_check); // 通过spi->chip_select spi->master来匹配spi->cs_gpio = master->cs_gpios[spi->chip_select]; // 设置本芯片为master的哪个片选spi_setup(spi); // 设置spi设备status = spi->master->setup(spi); // 调用spi_master 的 setup函数spi_set_cs(spi, false); // 禁止片选device_add(&spi->dev); // 加入设备,匹配具体的驱动error = bus_add_device(dev);bus_probe_device(dev);device_initial_probe(dev);__device_attach(dev, true);bus_for_each_drv(dev->bus, NULL, &data, __device_attach_driver);driver_probe_device(drv, dev);really_probe(dev, drv);if (dev->bus->probe) {ret = dev->bus->probe(dev);} else if (drv->probe) {ret = drv->probe(dev); // m25p_probe}
m25p_probe ret = spi_nor_scan(nor, flash_name, mode); // 建立 spi-nor mtd 芯片的工作模式 dummy 扇区等return mtd_device_parse_register(&nor->mtd, NULL, &ppdata,data ? data->parts : NULL,data ? data->nr_parts : 0); // 注册mtd分区继续分析剩下的函数kthread_worker_fn和spi_pump_messages
int kthread_worker_fn(void *worker_ptr)struct kthread_worker *worker = worker_ptr; // 为设置的master->kworkerstruct kthread_work *work;
repeat:if (!list_empty(&worker->work_list)) {/* 工作队列下面的work_list不为空,则取出工作实例 */work = list_first_entry(&worker->work_list,struct kthread_work, node);list_del_init(&work->node); // 从工作队列中摘下具体的实例}worker->current_work = work;work->func(work); // 调用工作实例下面的func执行,func为spi_pump_messagesgoto repeat;spi_pump_messages/* 取出queue下面的message,赋给master->cur_msg */master->cur_msg = list_first_entry(&master->queue, struct spi_message, queue);list_del_init(&master->cur_msg->queue);ret = master->prepare_transfer_hardware(master); // 准备硬件资源ret = master->transfer_one_message(master, master->cur_msg); // 传输补齐最后的数据构造以及上传到queue以及处理过程:
struct kthread_worker kworker; // 每个spi控制器上都有的一个工作队列
struct kthread_worker {spinlock_t lock; // 自旋锁struct list_head work_list; // 工作队列上的工作实例队列struct task_struct *task; // 具体执行数据传输的进程 struct kthread_work *current_work; // 工作队列当前正在处理的工作实例
};struct task_struct *kworker_task; // 处理工作队列的线程struct kthread_work pump_messages;
struct kthread_work {struct list_head node; // 通过node把work挂入到工作队列中// 当调度到本work时执行的回调函数,具体为spi_pump_messageskthread_work_func_t func; // void (*kthread_work_func_t)(struct kthread_work *work);struct kthread_worker *worker; // 具体属于的工作队列
};// spi读len个数据到buf中,spi为具体要进行数据传输的设备
static inline int
spi_read(struct spi_device *spi, void *buf, size_t len) // 构造spi_transfer结构体struct spi_transfer t = {.rx_buf = buf,.len = len,};struct spi_message m;spi_message_add_tail(&t, &m);// 把spi_transfer挂入到spi_message中return spi_sync(spi, &m);__spi_sync(spi, message, 0);struct spi_master *master = spi->master; // 获取到spi控制器,在初始化的时候就确定了message->spi = spi; // 把message和具体的spi设备挂钩status = __spi_queued_transfer(spi, message, false);list_add_tail(&msg->queue, &master->queue); // 把message挂入到master的queue中__spi_pump_messages(master, false); // 对message进行"抽取"// 把master->pump_messages工作实例挂入到master->kworker中,唤醒内核线程处理queue里面的messagequeue_kthread_work(&master->kworker, &master->pump_messages);return;wait_for_completion(&done); // 等待传输完成status = message->status;return status;// 异步传输spi数据,主要是利用master->transfer函数进行处理
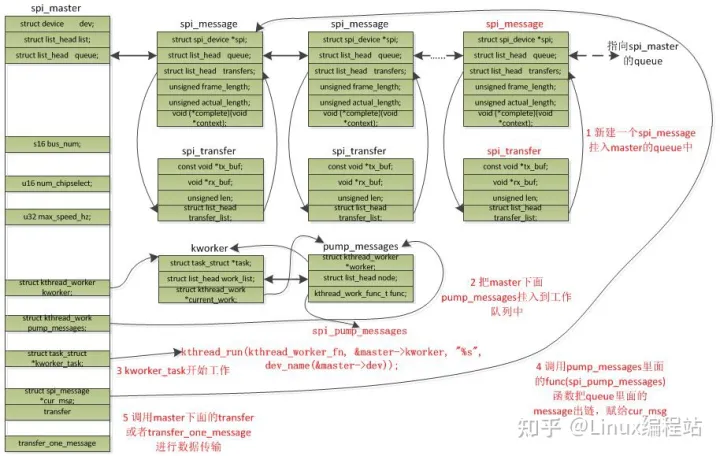
int spi_async(struct spi_device *spi, struct spi_message *message)ret = __spi_async(spi, message);return master->transfer(spi, message);return ret;数据的写流程和读基本一致!!qspi驱动的基本流程如图2所示,红色的步骤表示数据的构造以及处理过程。
上一篇:dfs序(树形结构线性化)
相关内容
热门资讯
埃菲尔铁塔在哪 中国仿建埃菲尔...
2019年4月26日,广西南宁市,街头惊现一座巨型山寨版埃菲尔铁塔,高约20米,白色塔身,造型逼真,...
苗族的传统节日 贵州苗族节日有...
【岜沙苗族芦笙节】岜沙,苗语叫“分送”,距从江县城7.5公里,是世界上最崇拜树木并以树为神的枪手部落...
北京的名胜古迹 北京最著名的景...
北京从元代开始,逐渐走上帝国首都的道路,先是成为大辽朝五大首都之一的南京城,随着金灭辽,金代从海陵王...
长白山自助游攻略 吉林长白山游...
昨天介绍了西坡的景点详细请看链接:一个人的旅行,据说能看到长白山天池全凭运气,您的运气如何?今日介绍...
世界上最漂亮的人 世界上最漂亮...
此前在某网上,选出了全球265万颜值姣好的女性。从这些数量庞大的女性群体中,人们投票选出了心目中最美...
应用未安装解决办法 平板应用未...
---IT小技术,每天Get一个小技能!一、前言描述苹果IPad2居然不能安装怎么办?与此IPad不...
脚上的穴位图 脚面经络图对应的...
人体穴位作用图解大全更清晰直观的标注了各个人体穴位的作用,包括头部穴位图、胸部穴位图、背部穴位图、胳...
猫咪吃了塑料袋怎么办 猫咪误食...
你知道吗?塑料袋放久了会长猫哦!要说猫咪对塑料袋的喜爱程度完完全全可以媲美纸箱家里只要一有塑料袋的响...
demo什么意思 demo版本...
618快到了,各位的小金库大概也在准备开闸放水了吧。没有小金库的,也该向老婆撒娇卖萌服个软了,一切只...
埃菲尔铁塔在哪 中国仿建埃菲尔...
2019年4月26日,广西南宁市,街头惊现一座巨型山寨版埃菲尔铁塔,高约20米,白色塔身,造型逼真,...
苗族的传统节日 贵州苗族节日有...
【岜沙苗族芦笙节】岜沙,苗语叫“分送”,距从江县城7.5公里,是世界上最崇拜树木并以树为神的枪手部落...
北京的名胜古迹 北京最著名的景...
北京从元代开始,逐渐走上帝国首都的道路,先是成为大辽朝五大首都之一的南京城,随着金灭辽,金代从海陵王...
世界上最漂亮的人 世界上最漂亮...
此前在某网上,选出了全球265万颜值姣好的女性。从这些数量庞大的女性群体中,人们投票选出了心目中最美...
长白山自助游攻略 吉林长白山游...
昨天介绍了西坡的景点详细请看链接:一个人的旅行,据说能看到长白山天池全凭运气,您的运气如何?今日介绍...
应用未安装解决办法 平板应用未...
---IT小技术,每天Get一个小技能!一、前言描述苹果IPad2居然不能安装怎么办?与此IPad不...
脚上的穴位图 脚面经络图对应的...
人体穴位作用图解大全更清晰直观的标注了各个人体穴位的作用,包括头部穴位图、胸部穴位图、背部穴位图、胳...
猫咪吃了塑料袋怎么办 猫咪误食...
你知道吗?塑料袋放久了会长猫哦!要说猫咪对塑料袋的喜爱程度完完全全可以媲美纸箱家里只要一有塑料袋的响...
demo什么意思 demo版本...
618快到了,各位的小金库大概也在准备开闸放水了吧。没有小金库的,也该向老婆撒娇卖萌服个软了,一切只...